軟硬結合——酷我音樂盒的逆天玩法

1 /***********************************************************
本文引用地址:http://www.104case.com/article/201701/343047.htm1 /***********************************************************************************************************/
2 //HC-SR04 超聲波測距模塊應用程序
3 //MCU: STC89C52/STC89C51
4 //晶振:11。0592
5 //接線:模塊TRIG接 P1.2 ECH0 接P1.1
6 //串口波特率9600
7 /***********************************************************************************************************/
8 #include
9 #include
10 #include
11
12 #define uchar unsigned char
13 #define uint unsigned int
14 #define RX P1_1
15 #define TX P1_2
16
17
18 unsigned int time=0;
19 unsigned int timer=0;
20 unsigned char S=0,a;
21 bit flag =0,usart_flag;
22
23
24 /*--------------------------------------------
25 USAR初始函數包括所有需要的中斷和時鐘,超聲波時鐘也在內]
26 ---------------------------------------------*/
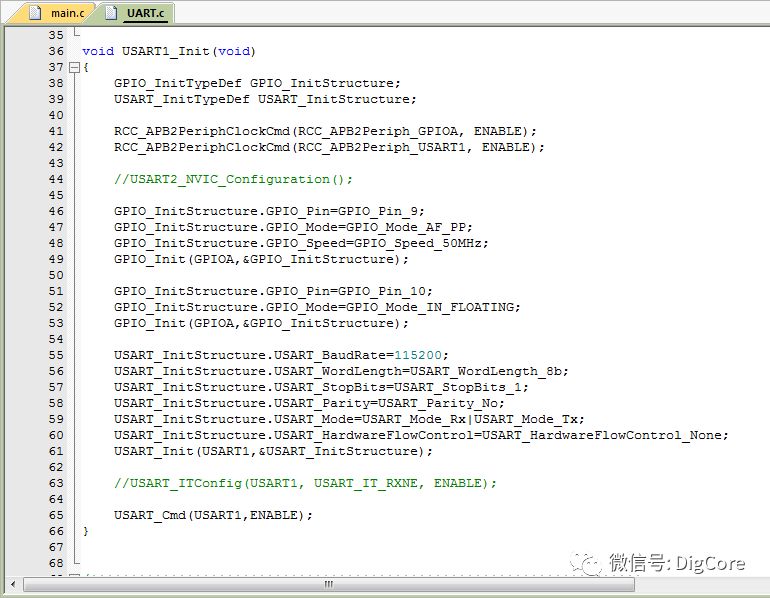
27 void USRT_init()
28 {
29 TMOD=0x21; //設置T1定時器工作方式2,設T0為方式1,GATE=1;
30 SCON=0x50;
31 TH1=0xfd; //T1定時器裝初值
32 TL1=0xfd;
33 TH0=0; //超聲波測距計時器裝初始值
34 TL0=0;
35 TR1=1; //啟動T1定時器
36 TR0=1;
37 REN=1; //允許串口中斷接收、
38 ET0=1; //允許T0中斷
39 SM0=0; //設定串口工作方式
40 SM1=1;
41 EA=1; //開總中斷
42 ES=1; //開串口中斷
43 }
44 /*--------------------------------------------
45 串口發送函數
46 ---------------------------------------------*/
47 void SeriPushSend(unsigned send_data)
48 {
49 SBUF=send_data;
50 while(!TI);
51 TI=0;
52 }
53 /*--------------------------------------------
54 串口中斷程序
55 ---------------------------------------------*/
56 void ser()interrupt 4
57 {
58 RI=0;
59 a=SBUF;
60 usart_flag=1;
61 }
62 /*--------------------------------------------
63 超聲波距離計算函數
64 ---------------------------------------------*/
65 void Conut(void)
66 {
67 time=TH0*256+TL0;
68 TH0=0;
69 TL0=0;
70 S=(int)(time*1.87)/100; //算出來是CM
71 if(flag==1 || S>30) //超出測量或無效數據
72 {
73 flag=0;
74 SeriPushSend(0x88);
75 }
76 else
77 {
78 SeriPushSend(S);
79 }
80 }
81 /*--------------------------------------------
82 毫秒延時函數
83 ---------------------------------------------*/
84 void delayms(unsigned int ms)
85 {
86 unsigned char i=100,j;
87 for(;ms;ms--)
88 {
89 while(--i)
90 {
91 j=10;
92 while(--j);
93 }
94 }
95 }
96 /*--------------------------------------------
97 超聲波測距中斷函數[計時用]
98 ---------------------------------------------*/
99 void zd0() interrupt 1 //T0中斷用來計數器溢出,超過測距范圍
100 {
101 flag=1; //中斷溢出標志
102 }
103 /*--------------------------------------------
104 超聲波測距啟動函數
105 ---------------------------------------------*/
106 void StartModule() //T1中斷用來掃描數碼管和計800MS啟動模塊
107 {
108 TX=1; //800MS 啟動一次模塊
109 _nop_();
110 _nop_();
111 _nop_();
112 _nop_();
113 _nop_();
114 _nop_();
115 _nop_();
116 _nop_();
117 _nop_();
118 _nop_();
119 _nop_();
120 _nop_();
121 _nop_();
122 _nop_();
123 _nop_();
124 _nop_();
125 _nop_();
126 _nop_();
127 _nop_();
128 _nop_();
129 _nop_();
130 TX=0;
131 }
132 /*--------------------------------------------
133 main函數
134 ---------------------------------------------*/
135 void main(void)
136 {
137 USRT_init();
138 while(1)
139 {
140 StartModule();
141 while(!RX); //當RX為零時等待
142 TR0=1; //開啟計數
143 while(RX); //當RX為1計數并等待
144 TR0=0; //關閉計數
145 Conut(); //計算
146 delayms(10); //10MS
147 }
148 }
>_<:下面將重點介紹如何從距離信息轉換為按鈕觸發消息的!
6.1、檢測手勢:
下圖是當有手進入測距區時超聲波測距儀采集到的數據,其中橫軸為時間,縱軸為距離單位厘米。從圖中可以看出當沒有障礙物時距離維持在42CM處(這是我在示波器軟件中故意設置的一個閾值,硬件代碼里也設了閾值即:超出30cm就發送距離為0x88cm)。當手揮進對應區域時出現一個下降沿,當手離開時出現一個上升沿,當手在區域中停留的時間越長其對應跨度越大。(圖中共有4個凹槽,表示手4次揮進揮出區域,其中第3次停留時間較長)

6.2、干擾信號:
如下圖(不要管上面的圖標,當時用的時候沒修改圖表的單位和名稱,嘻嘻~)當沒有手進入區域時有時候硬件會出現干擾而產生一個很尖的下降和上升沿,其實這時并沒有手揮進區域,這個干擾會對結果造成影響,甚至出現錯誤的控制!!!

6.3、去除干擾:
如下圖最下面的窗口是距離-時間圖,其中第1、2、4為手揮進測距區,第3個是一次干擾。我是這樣轉換的:將距離-時間圖轉換為左上角的時長-時間圖,每個波的峰值就是對應距離時間圖中跳變時間,這樣我們就能將每次手進入或者是干擾持續的時間的值獲得!(由于干擾幾乎都是瞬間跳變,所以濾掉那個最小的第3個時長-時間波峰對應的距離-時間圖中的跳變就行啦)

6.4、時長分段產生將控制信號signal:
這里將遮蔽時長進行分段產生3種不同的控制信號:[參見5.1.2串口數據接收函數的第21~27行](這里num就是時長,可見:當時長為2~5時產生signal為1的信號,參看Timer部分可以發現這個信號控制點擊下一曲;當時長在6~9的時候觸發上一曲;當時長在10以上觸發暫停)因為我經常要下一曲所以設成手一揮就執行,暫停一般操作較少就讓它時長長一點(就像筆記本電腦的關機按鈕!),加入上一曲是為了防止失誤時能回到上面一個。!!!注意到這里沒有把時長為1的包含在內,這就是上面分析的結果,即所謂的濾波!消除干擾~
1 if (num > 1 && num < 6){
2 signal = 1;
3 }else if (num > 5 && num < 10){
4 signal = 2;
5 }else if (num > 9){
6 signal = 3;
7 }

7、總結:
哈哈,終于寫完啦!>_<:快天亮啦~其實我本來想用腦電波來控制的,但是現在手頭有點吃緊,買不起腦電波呀~只能又一次玩廉價消費品啦~不過想一下連揮一揮手都不用的操作,是不是酷炫極啦!

評論