信號(hào)完整性分析基礎(chǔ)系列之十九--高速串行信號(hào)接收機(jī)測(cè)試

2)內(nèi)部BERT
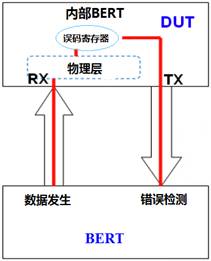
圖7內(nèi)部BERT測(cè)試框圖
DUT直接對(duì)接收到的BERT數(shù)據(jù)進(jìn)行誤碼判斷,并把誤碼率測(cè)試結(jié)果保存在DUT寄存器里。BERT通過(guò)讀取誤碼寄存器得到誤碼率測(cè)試結(jié)果。
如前文所述,誤碼率測(cè)試儀能夠在激勵(lì)信號(hào)中注入一定程度的“干擾”,并且“干擾”的特征參數(shù)可以定量調(diào)節(jié),這些“干擾”包括:
1)信號(hào)幅度
信號(hào)從發(fā)送器輸出,經(jīng)過(guò)信道到達(dá)接收端,幅度可能衰減以至于接收機(jī)無(wú)法識(shí)別。因此誤碼率測(cè)試儀通過(guò)逐步降低激勵(lì)信號(hào)幅度,直到接收機(jī)芯片無(wú)法正確檢測(cè)出數(shù)據(jù),從而獲得被測(cè)芯片的接收靈敏度。下圖是一個(gè)典型的測(cè)試結(jié)果圖,橫坐標(biāo)是激勵(lì)信號(hào)的差模幅度,縱坐標(biāo)代表共模偏置程度。綠色點(diǎn)表示接收機(jī)芯片能正常識(shí)別出該點(diǎn)代表的差模共模幅度,紅叉則表示不能正常接收。這樣能得一幅直觀的接收機(jī)靈敏度圖。
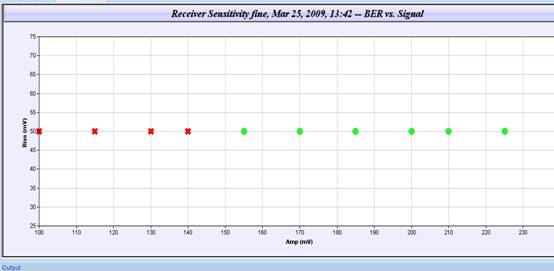
圖8接收靈敏度測(cè)試結(jié)果圖
2)預(yù)加重(Pre-Emphasis)
高速串行信號(hào)普遍運(yùn)用預(yù)加重技術(shù)來(lái)補(bǔ)償信道對(duì)信號(hào)高頻分量的衰減。通過(guò)調(diào)節(jié)激勵(lì)信號(hào)預(yù)加重程度可以補(bǔ)償測(cè)試夾具、電纜的影響,確保信號(hào)達(dá)到接收端后的幅度符合預(yù)期。下圖是一個(gè)預(yù)加重信號(hào)的眼圖。
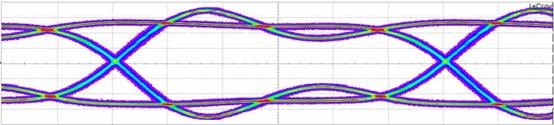
圖9預(yù)加重后的信號(hào)眼圖
3)抖動(dòng)
接收機(jī)芯片中的時(shí)鐘恢復(fù)電路運(yùn)用鎖相環(huán)來(lái)跟蹤數(shù)據(jù)的跳變沿,其頻響是一個(gè)低通濾波器。當(dāng)串行數(shù)據(jù)信號(hào)的抖動(dòng)變化頻率較低時(shí),處于直流到鎖相環(huán)截至頻率范圍以內(nèi),鎖相環(huán)就能及時(shí)追蹤到數(shù)據(jù)跳變沿(即鎖住相位),輸出的時(shí)鐘與輸入數(shù)據(jù)同相(嚴(yán)格講相位差為固定常數(shù)),這樣抖動(dòng)為零。當(dāng)連續(xù)邊沿的抖動(dòng)變化太快時(shí)(即存在高頻抖動(dòng)時(shí)),鎖相環(huán)不能及時(shí)追蹤到邊沿的變化,于是輸出的時(shí)鐘和數(shù)據(jù)邊沿存在抖動(dòng)。誤碼率測(cè)試儀可以輸出含有定量正弦抖動(dòng)(即周期抖動(dòng))和隨機(jī)抖動(dòng)的數(shù)據(jù),從而評(píng)估接收機(jī)芯片的抖動(dòng)容限。
圖10含有周期抖動(dòng)的激勵(lì)信號(hào)眼圖
圖11是一個(gè)抖動(dòng)容限測(cè)試結(jié)果圖,橫坐標(biāo)表示抖動(dòng)的頻率,縱坐標(biāo)表示抖動(dòng)的值。綠色點(diǎn)表示在相應(yīng)抖動(dòng)激勵(lì)下,接收機(jī)的誤碼率測(cè)試可以通過(guò)(例如小于10-12),紅叉表示不能通過(guò)。圖中一條黑色的曲線是USB3.0規(guī)范要求的抖動(dòng)容限曲線。測(cè)試后,通過(guò)檢查曲線下方是否有測(cè)試不通過(guò)點(diǎn)來(lái)判斷接收機(jī)特性是否符合標(biāo)準(zhǔn)。
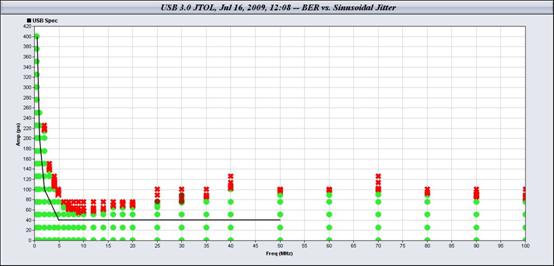
圖11抖動(dòng)容限測(cè)試結(jié)果圖
4)時(shí)鐘擴(kuò)頻(Spread Spectrum Clocking,SSC)
時(shí)鐘擴(kuò)頻是用一個(gè)低頻信號(hào)去調(diào)制時(shí)鐘。在頻譜上,時(shí)鐘單一的譜線在調(diào)制后變?yōu)樵谝欢ǚ秶鷥?nèi)分布,從而降低頻譜峰值水平。這是一種減小輻射發(fā)射峰值的方法。目前高速串行標(biāo)準(zhǔn)一般都要求支持時(shí)鐘擴(kuò)頻,因此測(cè)試接收機(jī)能否識(shí)別出帶有擴(kuò)頻的數(shù)據(jù)也是重要的測(cè)試內(nèi)容。
3.力科接收機(jī)測(cè)試方案-PeRT3
PeRT3是Protocol-enabled Receiver and Transmitter Tolerance Tester的簡(jiǎn)寫(xiě),即具備協(xié)議使能的接收機(jī)和發(fā)送器容限測(cè)試儀。包含Eagle和Phoenix兩個(gè)系列,外觀如下圖:


圖12力科PeRT3
PeRT3首先具備了BERT的Pattern Generator和Error Detector功能,可以對(duì)激勵(lì)數(shù)據(jù)注入前文所提到的各種“干擾”,其次還具備業(yè)界其他BERT所不具有的功能:
1)支持USB3.0,PCI Express,SATA,SAS標(biāo)準(zhǔn)規(guī)定的接收機(jī)一致性測(cè)試。目前是SuperSpeed USB(USB3.0)Platform Interoperability Lab采用和推薦的測(cè)試方案。
2)能夠自動(dòng)完成協(xié)議握手和DUT的初始化。
3)能夠自動(dòng)控制DUT進(jìn)入或退出回環(huán)模式。如果沒(méi)有這項(xiàng)功能,測(cè)試人員只能通過(guò)對(duì)DUT相關(guān)寄存器進(jìn)行編程的方法使其進(jìn)入特定狀態(tài),操作不方便。
1)USB3.0收發(fā)器為補(bǔ)償發(fā)送和接收時(shí)鐘的頻率偏差,會(huì)在發(fā)送出去的碼流中加入一些SKP符號(hào)。這樣BERT的Error Detector將會(huì)收到測(cè)試碼和多余的SKP符號(hào)。傳統(tǒng)的BERT會(huì)誤認(rèn)為測(cè)量到了誤碼。而力科PeRT3可以智能地添加和刪除SKP后,再來(lái)計(jì)算是否有誤碼。
2)支持PCI Express Gen3動(dòng)態(tài)均衡(Dynamic Equalization)測(cè)試
3)除了可以測(cè)量誤比特率,還可以測(cè)量誤幀率(Frame Error Rate),識(shí)別和記錄協(xié)議層的錯(cuò)誤。
如果配合示波器使用,PeRT3能夠完成發(fā)送器和接收機(jī)的全面測(cè)試,芯片設(shè)計(jì)者憑借這些測(cè)試驗(yàn)證工具,可對(duì)其高速收發(fā)器的設(shè)計(jì)充滿信心。
參考文獻(xiàn)
[1] David Li . Receiver Testing Basic. LeCroy Corporation.
[2] PeRT3 Eagle System User Manual. LeCroy Corporation.

評(píng)論