嵌入式邏輯分析儀加速SoPC 設計

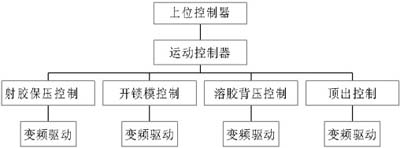
圖1 全電動注塑機控制系統結構
上位控制器有三大主要功能:設定控制參數和目標;顯示控制結果;協調機器各環節的動作順序。
運動控制器的主要功能是在上位控制器的協調下,完成過程控制,如壓力、位置以及速度的控制,并把控制的結果和相關狀態傳遞給上位控制器。具體地,就是實現射膠電機、溶膠電機、開鎖模電機和頂出電機的控制。
控制流程可以描述為:由上位控制器發出指令要實現何種控制(例如射膠的速度或壓力控制),運動控制器將根據接受到的指令和實際狀況,給出控制調節信號至變頻器,變頻器驅動電機旋轉,電機通過永磁皮帶與滾珠絲杠相連,將圓周運動轉換成直線運動,從而實現速度、壓力或位置的控制。
軟件程序的基本設計思路如圖2所示, 全電注塑機的硬件控制原理框圖如圖3所示。

圖2 任務流程圖

圖3 全電注塑機控制原理框圖
結語 Itron規格在國內目前鮮為人知,但其豐富的功能、優越的性能,及其開放性的政策,使其有潛力變成嵌入式RTOS的世界標準之一。另外,注塑機行業全電機化是必然趨勢,用變頻技術實現是可行的。基于獨到的見解和大膽的設想,使用特制誘導電機、嵌入式運動控制卡、自主開發的控制算法,本文成功開發了低成本、高性能的誘導全電動注塑機。機器的電氣成本同比降低了50%左右,控制性能比油壓注塑機有大幅度的提高,不遜于國內廠家開發的通常概念的永磁全電動注塑機,在穩定性和壽命方面更有其優勢。
參考文獻
1 Ken Sakamura.ITRON Specification.TRON ASSOCIATION, 2002.
2 稻葉善治.電動伺服射出成形機及精密成形.日本:日刊工業出版社,1999年9月
3 魏忠,蔡勇,雷紅衛.嵌入式開發詳解.電子工業出版社,2003年1月
4 Furong Gao,Fuli Wang,Mingzhong Li.Fuzzy Multi-Model Based Adaptive PredictiveControland its Application to Thermoplastic Injection Molding.The Canadian Journal of ChemicalEngineering,Volume 79,April 2001:263-272

評論