大直徑測量數(shù)據(jù)采集系統(tǒng)中動(dòng)態(tài)鏈接庫設(shè)計(jì)0,

Lab VIEW是一種基于圖形程序的虛擬儀器編程語言,Lab VIEW程序稱為虛擬儀器程序(簡稱VI)。Lab VIEW按照模塊化編程思想,將一些特定的測試任務(wù),建立成一系列的VI,然后通過這些VI的組合來構(gòu)成各種復(fù)雜的、功能強(qiáng)大的測試系統(tǒng)。Lab VIEW除了帶有各種基本的VI庫(GP-IB、VISA、VXI和串行接口儀器的驅(qū)動(dòng)程序等)和功能超強(qiáng)且龐大的分析函數(shù)庫外,還可以通過調(diào)用外部代碼實(shí)現(xiàn)Lab VIEW比較復(fù)雜的接口功能,其中就包括動(dòng)態(tài)鏈接庫調(diào)用機(jī)制。
本文引用地址:http://www.104case.com/article/201701/337647.htm動(dòng)態(tài)鏈接庫可采用VB、VC++6.0等高級(jí)語言開發(fā),VC++6.0編制動(dòng)態(tài)鏈接庫,首先由AppWizard生成DLL框架,用戶自己鍵入實(shí)現(xiàn)各種功能的代碼。DLL需要h函數(shù)聲明文件、C源文件及def定義文件。h文件的作用是聲明DLL要實(shí)現(xiàn)的函數(shù)原型,供DLL編譯使用,同時(shí)還提供應(yīng)用程序編譯使用。C文件是實(shí)現(xiàn)具體文件的源文件,它有一個(gè)入口點(diǎn)函數(shù),在DLL被初次調(diào)用時(shí)運(yùn)行,完成初始化工作。def文件是DLL項(xiàng)目中比較特殊的文件,用于定義該DLL項(xiàng)目將輸出的函數(shù),只有def文件列出的函數(shù)才能被應(yīng)用函數(shù)調(diào)用,函數(shù)名列在該文件EXPORTS的關(guān)鍵字下。
多滾輪法大直徑測量的數(shù)據(jù)采集系統(tǒng)
多滾輪法大直徑測量原理結(jié)構(gòu)
滾輪法大直徑測量原理結(jié)構(gòu)主要有被測大軸、滾輪、圓光柵、信號(hào)調(diào)理與接口、計(jì)數(shù)器及大軸轉(zhuǎn)數(shù)測量標(biāo)記組成。大軸直徑計(jì)算公式為
D=α*d/2τN
其中,D為被測大軸直徑;d為滾輪直徑;α為滾輪轉(zhuǎn)動(dòng)角度;N為大軸轉(zhuǎn)動(dòng)周數(shù)。滾輪采用特殊的結(jié)構(gòu)設(shè)計(jì),以減小測量過程中打滑發(fā)生的幾率。同時(shí)通過3個(gè)滾輪的冗余測量信號(hào),可辯識(shí)出測量過程中的“打滑發(fā)生段”,并在進(jìn)行三滾輪信號(hào)合成時(shí),采用有效的數(shù)據(jù)融合技術(shù),進(jìn)一步將“打滑段”的信號(hào)剔除。通過對(duì)接觸壓力大小與滾輪直徑變化的關(guān)系作精確標(biāo)定,測量時(shí)根據(jù)擬合數(shù)學(xué)模型對(duì)滾輪變形作適時(shí)修正,以消除或減小滾輪變形引起的測量誤差。為減小溫度場不均勻或變化所導(dǎo)致的測量誤差,在工件表面布置多個(gè)溫度傳感器,用以監(jiān)測工件是否進(jìn)入恒溫狀態(tài)及工件溫度的變化和分布情況,以便對(duì)該溫度場引起的大直徑尺寸變化進(jìn)行修正。用微位移傳感器測量大軸表面形狀誤差,分離出各次諧波,用以修正測得直徑,減小形狀誤差的影響。
數(shù)據(jù)采集系統(tǒng)組成
多滾輪法大直徑測量系統(tǒng)采用的傳感器種類和數(shù)目均較多,多參數(shù)的測量和控制由虛擬儀器測量系統(tǒng)實(shí)現(xiàn),其結(jié)構(gòu)框圖如圖1所。
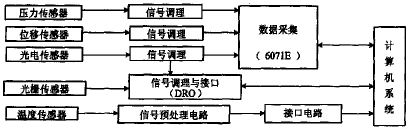
圖1 數(shù)據(jù)采集系統(tǒng)框圖
光柵數(shù)據(jù)采集硬件主要由RENISHAW公司的RESR20圓光柵編碼器和FAGOR公司的DRO板組成,RESR20圓光柵編碼器的角分辨力可達(dá)0.01″,分度不確定度為0.5″。RGH20讀數(shù)頭輸出4路信號(hào),DRO板對(duì)這4路信號(hào)進(jìn)行細(xì)分后轉(zhuǎn)換成數(shù)字信號(hào)輸入計(jì)算機(jī),完成對(duì)圓光柵信號(hào)的數(shù)據(jù)采集。光電傳感器的信號(hào)由6071E板(該板為NI公司的多功能數(shù)據(jù)采集板,具有模擬量、數(shù)字量采集單元,該板同時(shí)用于位移、壓力等信號(hào)的采集)上的計(jì)數(shù)器送入計(jì)算機(jī),作為數(shù)據(jù)采集的觸發(fā)信號(hào)。同時(shí)為減小數(shù)據(jù)采集啟停引起的誤差,通常在大軸轉(zhuǎn)動(dòng)數(shù)周過程中采集光柵信號(hào)。在編制采集軟件時(shí)設(shè)置大軸轉(zhuǎn)動(dòng)周數(shù)單元,當(dāng)大軸轉(zhuǎn)動(dòng)且計(jì)數(shù)標(biāo)記通過光電傳感器時(shí),計(jì)算機(jī)開始采集數(shù)據(jù),當(dāng)大軸轉(zhuǎn)動(dòng)周數(shù)達(dá)到預(yù)設(shè)值時(shí),停止數(shù)據(jù)采集。
數(shù)據(jù)采集系統(tǒng)軟件設(shè)計(jì)
6071E多功能采集卡自身帶有適用于LabVIEW環(huán)境的驅(qū)動(dòng)程序,直接進(jìn)行設(shè)置即可。DRO板必須用VC++編程調(diào)用其動(dòng)態(tài)鏈接庫進(jìn)行初始化,然后將VC++的調(diào)用生成動(dòng)態(tài)鏈接庫,由Lab2VIEW調(diào)用完成對(duì)DRO板的初始化,參數(shù)的初始化包括滾壓輪標(biāo)準(zhǔn)參數(shù)、測試任務(wù)參數(shù)以及其他環(huán)境參數(shù)等。初始化結(jié)束,計(jì)算機(jī)檢測到觸發(fā)信號(hào)后開始數(shù)據(jù)采集,數(shù)據(jù)采集部分同樣需要用VC++編程調(diào)用DRO板的動(dòng)態(tài)鏈接庫的庫函數(shù)。圓光柵信號(hào)輸入計(jì)算機(jī)后由軟件進(jìn)行數(shù)據(jù)的處理和存儲(chǔ),當(dāng)大軸轉(zhuǎn)動(dòng)周數(shù)等于預(yù)設(shè)值時(shí),停止采集,一次數(shù)據(jù)采集過程完成。
LabVIEW調(diào)用動(dòng)態(tài)鏈接庫,使用LabVIEW功能模板中“Advanced”子模板的“調(diào)用庫函數(shù)(Call Library Function)”結(jié)點(diǎn)。實(shí)現(xiàn)動(dòng)態(tài)鏈接庫調(diào)用步驟如下:
(1)在LabVIEW程序建立“調(diào)用庫函數(shù)結(jié)點(diǎn)”。其中“Call Library Function”結(jié)點(diǎn)通過選擇功能模板“Advanced”子模板的“Call Library Function”功能產(chǎn)生。
(2)配置“調(diào)用庫函數(shù)結(jié)點(diǎn)”。雙擊框圖程序窗口的“Call Library Function”結(jié)點(diǎn),在彈出的對(duì)話框中對(duì)此“調(diào)用庫函數(shù)結(jié)點(diǎn)”進(jìn)行配置。其中:在“LibraryNameor Path”項(xiàng)中鍵入結(jié)點(diǎn)所鏈接的DLL文件名,它由c源代碼編譯而來;在“Function Name”項(xiàng)中鍵入結(jié)點(diǎn)相鏈接的DLL文件中函數(shù)的名稱;參數(shù)“returntype”的類型選擇“Void”,并增加所需的其他返回參數(shù)。
(3)編輯c源文件。c源文件包括硬件初始化文件和數(shù)據(jù)采集文件。硬件初始化部分源代碼如下:
//FirstInittheBoardConfigandAxisConfigData
BoardConfig.NumberOfAxes=4;
do
{
printf(“Selectsignaltype(0=TTL,1=1Vpp):”);
signal_type=getch();
}while((signal_type<‘0’) (signal_type>‘1’));
(signal_type>‘1’));
signal_type=signal_type-‘0’;
//Enteryourownvalues,theseareonlyasample.
for(i=0;i
AxisConfigData[i].Resolution=0.005;
AxisConfigData[i].CountDirection=0;
AxisConfigData[i].SignalType=signal_type;
AxisConfigData[i].TTLWaveMultiply=0;
AxisConfigData[i].SineWaveMultiply=0;
AxisConfigData[i].MachineErrorComp=0;
AxisConfigData[i].I0Type=0;
AxisConfigData[i].EncoderFactor=1000;
AxisConfigData[i].EncoderOffset=0;
AxisConfigData[i].ExternalMultiply=1;
}
//CallingtoIniBoardfunction.
if(IniBoard(&BoardConfig,&AxisConfigData[0])==0)
{
printf(“Errorduringinicialization”);
exit(0);
}
數(shù)據(jù)采集部分源代碼如下:
//CounterTest
voidCounterTest(void)
{
ReadAllCounters(&AxisValuesData);
Axis_X=AxisValuesData.AxisDisplayValue[0];
Axis_Y=AxisValuesData.AxisDisplayValue[1];
Axis_Z=AxisValuesData.AxisDisplayValue[2];
Axis_W=AxisValuesData.AxisDisplayValue[3];
printf(“X=%4.4f”,Axis_X); //PrintthevalueofAxisX
printf(“Y=%4.4f”,Axis_Y);
printf(“Z=%4.4f”,Axis_Z);
printf(“W=%4.4f”,Axis_W);
printf(“”);
}
(4)編譯c源代碼。將c源文件編譯成DLL文件,使用VC++6.0完成。
(5)運(yùn)行VI。運(yùn)行由上述步驟生成的LabVIEW程序。
結(jié)束語
LabVIEW的外部代碼擴(kuò)展功能是其重要特點(diǎn)之一,調(diào)用動(dòng)態(tài)鏈接庫是LabVIEW提供的調(diào)用外部代碼的4種途徑中最通用的一種。可調(diào)用標(biāo)準(zhǔn)共享庫和用戶自定義的庫函數(shù),對(duì)于不附帶LabVIEW驅(qū)動(dòng)程序的硬件尤其具有使用價(jià)值。通過調(diào)用動(dòng)態(tài)鏈接庫機(jī)制可引入C語言的強(qiáng)大功能,確實(shí)是一條增強(qiáng)LabVIEW與其它Windows應(yīng)用程序之間的數(shù)據(jù)共享能力的良好途徑。

評(píng)論