LabVIEW與樂高NXT機器人的入門

講講Labview程序中多態模塊的切換方法和參數設置方法。
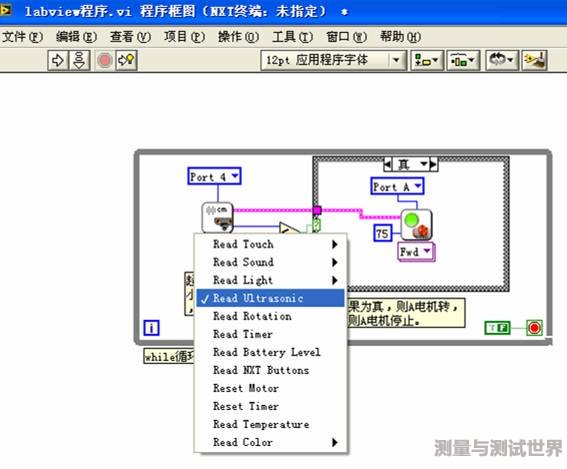
上圖“傳感器”多態模塊,點擊模塊下拉按鈕,出現下拉列表,選擇“Read Ultrasonic”,這樣“傳感器”多態模塊就變成了“超聲波傳感器Ultrasonic sensor”模塊了。
在模塊的周圍有些輸入或輸出端子,你用鼠標在端子上停留一小會,就會出現這個端子的用處提示。然后點擊右鍵,出現快捷菜單,如下圖:
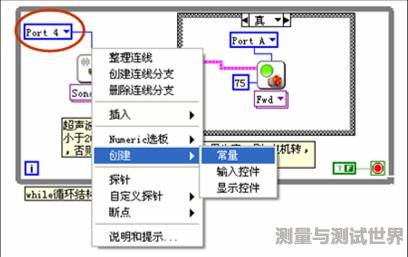
點擊“創建”→“常數”,就會出現一個列表選項,并且它已經連接到了那個端子,上圖用“紅色”圈加注的列表選項用來選擇超聲波傳感器連接在NXT控制器的哪個輸入端口?點擊列表選項的下拉按鈕,我把端口號設置為4。
再比如電機模塊的功率參數,也是用這種方法,點擊“創建”→“常數”,出現的電機功率常數是默認的“75”,雙擊一下“75”,可以修改功率值為0~100的任意值。
程序的下載步驟一:
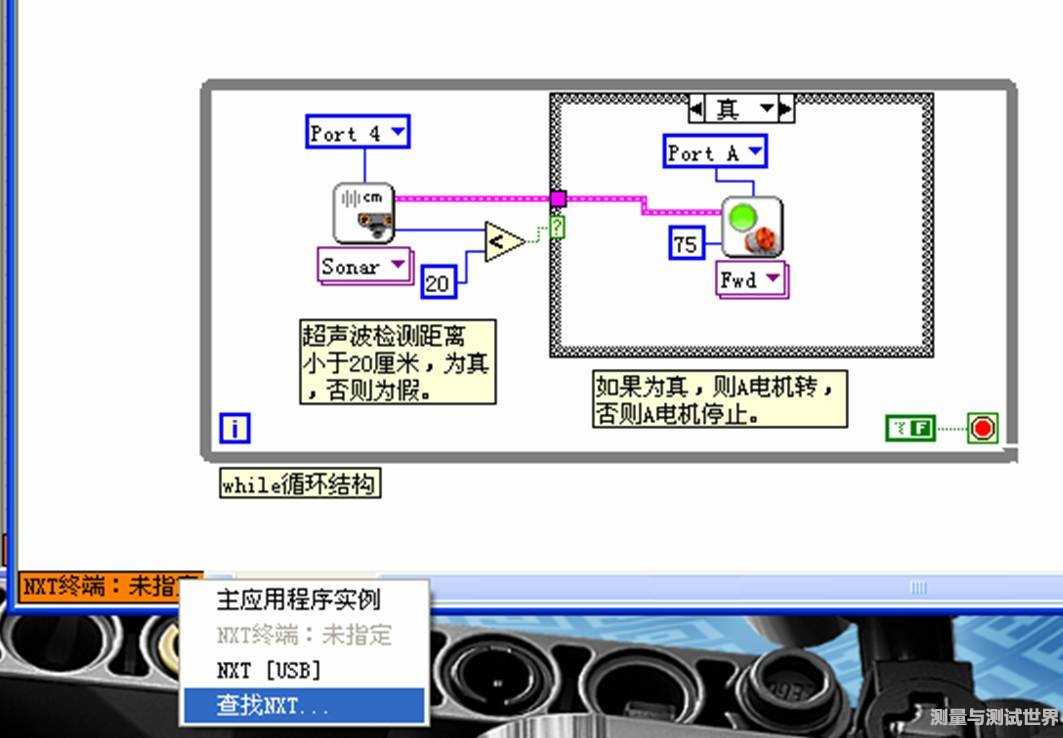
鼠標右擊程序框圖界面左下角的“NXT終端”,出現快捷菜單,選擇“查找NXT”。
程序的下載步驟二:
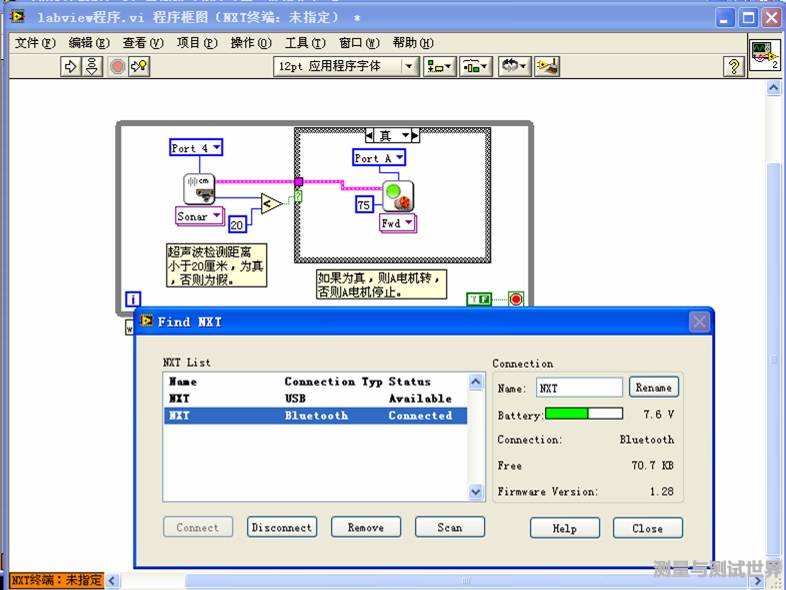
上圖是程序下載方式設置窗口,我的NXT控制器既連接了USB下載線,又有藍牙適配器,如果你在USB插槽上插入NXT認可的藍牙適配器,還看不到藍牙Bluetooth,就按窗口中的“Scan”按鍵。我選擇了藍牙下載程序的方式,并點擊了“Connect”,隨之看到窗口Status欄中顯示“Connected”,說明藍牙連接成功!然后“Close”關閉窗口。對了,整個程序下載過程,你的NXT控制器要開機啊。
程序的下載步驟三:
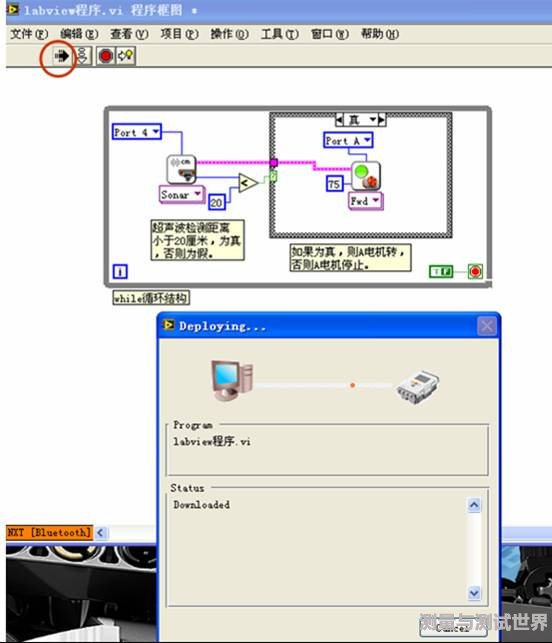
點擊我用“紅色”圈加注的“程序運行”圖標,于是從程序編譯、下載和運行,可以一起完成,現在程序已經到了NXT控制器,而且已經處于運行狀態了,立即試試實驗效果,不錯!

評論