基于LabVIEWRT的數據實時傳輸系統

在仿真系統諸如分布式仿真系統、半實物仿真系統中, 數據通訊的正確性、快速性和可靠性對仿真的質量有著至關重要的決定影響。而通訊的實時性能與各部分的數據傳輸速度密切相關, 其中包括了硬件以及軟件上各方面的因素。以往在硬件上采取的措施常常是研制高速的數字 /模擬量接口設備等, 但這種方法存在很多缺陷, 如缺乏通用性、傳輸距離受較大限制等等。而隨著各種實時網絡產品的開發, 其在仿真系統中的應用也愈加增多。這些產品的共同特點就是通訊速率快、傳輸距離長、通用性好, 并且可以連接多個節點組成一個實時網絡,因而具有十分優越的應用性。本文根據實際仿真設備通訊的需求, 利用反射內存VM IP-CI- 5565及其集線器 VM I ACC - 5595組建了一個數據傳輸網絡。并結合虛擬儀器編程語言LabVIEW( RT ), 編制了數據采集/傳送軟件。通過從硬件以及軟件上多方面對提升系統實時性能的考慮, 使得系統具有良好的工作表現, 從而組建了一個具有較好適用性以及擴展性的通訊系統。
本文引用地址:http://www.104case.com/article/201701/337322.htm1 系統硬件組建
1 1 1 實時通訊網絡與反射內存
實時通訊網絡是用于需要較高實時性要求的應用領域的專用網絡通訊技術, 一般采用基于高速網絡的共享存儲器技術實現。它除了具有嚴格的傳輸確定性和可預測性外, 還具有速度高、通信協議簡單、宿主機負載輕、軟硬件平臺適應性強、可靠的傳輸糾錯能力、支持中斷信號的傳輸等特點。實時通訊網絡可廣泛用于各種領域, 例如實時的飛行仿真器、核電站仿真器、電訊、高速過程控制 (軋鋼廠和制鋁廠 )、高速測試和測量以及軍事系統。VMIPCI-5565是 VMIC公司生產的基于 PCI總線的反射內存卡, 它使用光纖進行數據的傳輸, 從而不存在電磁輻射,也不受到來自無線電的電子 /電磁干擾, 具有很好的安全性和可靠性。另外, 5565采取了高性能的 H ub (網絡集線器 ) 結構配置成實時網絡, 可以實現多達 256個節點的計算機內存共享, 可以實現高速的實時數據通信[ 1]。因而, 其對于分布式仿真系統來說, 具有良好的應用價值。 VMIPCI- 5565組建的網絡結構如圖 1所示。
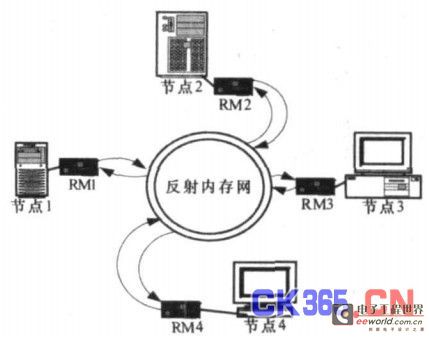
圖 1反射內存網絡組建結構
1 1 2 VM IACC- 5595的內部結構與系統網絡結構反射內存卡 VM IPC I- 5565對應的網絡集線器型號為 VMIACC-5595 , 它是一個8端口并且通過層疊可以實現 256節點網絡的網絡集線器。而由于 VM I ACC - 5595獨 特的內部結構 [ 2], 使得在配置網絡時會發現整個網絡的實時性能有一定的差異。根據 VM IACC - 5595內部結構圖[ 2]可知, 在利用其組建網絡時, 縱使從外部看網絡是星形結構, 但內部依然是雙環形結構。VM I ACC - 5595簡化的內部結構如圖 2所示。

圖 2 簡化的 VM I ACC- 5595單機結構
可見由于 VM I ACC- 5595內部存在由 0、1、 2 、 3和 4、 5 、6、7節點組成的兩個環形, 數據在任意兩節點之間傳送的時間并不像嚴格意義上的星形結構那樣完全相同。如數據從 0節點傳向 1節點和傳向 3節點所費時間理論上應該是 1 /3關系,這樣的差異在實際網絡節點功能配置時是不得不考慮的。通過分析可以發現, 在設計網絡時需要著重考慮節點 3和節點 0、節點 7和節點 4的內在關系, 這樣可以即滿足設計需求, 又能夠減少數據在反射內存網絡上的傳輸延遲。即根據節點對數據的要求來配置節點的位置, 若節點以發送數據為主則應配置在 3或 7節點, 而以接受處理為主要任務的節點則應配置在 4或 0節點。當存在數據向其它網絡轉接或集中處理節點時, 這點的考慮就會更加重要。后經實驗證明, 不同配置的網絡在 100個 32位精度數據傳輸時間上的差異在 10微秒級左右, 而隨著數據量的增加時間差異會更加顯著。在本系統中, 把主要產生數據的設備) ) ) /海鷹仿真機 0和 /銀河仿真工作站0 (或數據采集計算機 ) 置于 3 、 7節點,而把數據處理設備如 SG I圖形工作站、干擾與背景實時控制計算機等配置與其它節點。這樣, 從節點的功能配置上力求到了最優化。
2 系統軟件實現
2 1 1 LabVIEW 編程環境及其實時組件 (RT)
系統中數據采集 /傳送程序利用 LabVIEW ( RT) 編制而成。 LabV I EW 是由美國NI公司推出了一種優秀的面向對象的圖形化編程語言, 目前正被大量用于開發數據監測、數據測量采集系統、工業自動控制相同和數據分析系統等領域。LabV IEW 的實時組件 LabV I EW Rea l- T i m e ( RT) 是為了滿足測控領域中日益增多的實時性需求而出現的。與 Lab -V I EW 不同, RT的工作模式為: 在宿主機上開發應用程序,然后下載到目標計算機上去運行。目標機可以是 N I公司專門研制的 RT目標智能板卡, 也可以是通用的計算機, 但目標機上運行的卻是一個專門下載 (預先安裝 ) 的實時系統。比如文中系統所采取的 LabVIEW RT 810版本, 其目標機上運行的是 N I基于實時系統 Pharap改造開發的實時系統。由于目標機運行的與本身操作系統無關, RT工作模式就具有較好的適用性[3]
。
應用 LabV IEW RT環境編程時, 必須的步驟如下:
( 1) 配置目標計算機 [4]。包括設置第一啟動盤 (根據下一步的啟動方式決定是硬盤還是軟盤 ), 屏蔽無關的操作、中斷如 USB功能等, 以使目標機啟動在實時狀態下及盡量增強目標機的實時性能。

評論