高精度A/D在測磁設備中的應用

1 AD676的結構特點
在對艦船磁場的測量過程中,由于艦船的運動姿態不斷變化,使艦船磁場投影到各分量的強度也不斷變化。為實現對艦船磁場的動態測量,因此,磁場測量必須快速而準確。選用87C51單片機擴展內置微控制器的高速16位A/D轉換器AD676能很好地滿足這一要求。
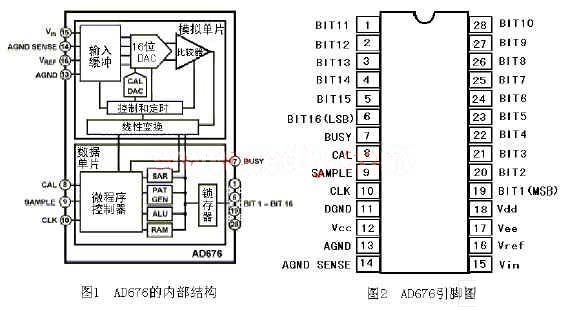
AD676的內部結構如圖1所示。由兩個單片部分組成,即數字控制單片和模擬ADC單片。數字控制單片是用DXPCMOS工藝制造,而模擬ADC單片是用BIMOSⅡ工藝制造的。該器件是使用逐次逼近技術來實現A/D轉換的,但內部沒有傳統的電阻梯網絡,取而代之的是電容陣列。AD676是采用帶二進制權值的電容器將輸入的采樣信號進行分配以實現模擬到數字的轉換的。采用電容陣列帶來了三方面的好處:
(1).達到了100KSPS的高速轉換率(總的轉換時間為10μS);
(2).消除了傳統的電阻網絡因電阻值隨溫度變化所引起的誤差;
(3).在不需增加外部電路的情況下,電容陣列實現了采樣保持功能。
但是,電容陣列具有初始誤差,內部微程序控制器是專為消除電容陣列的初始誤差而
設計的。微程序控制器通過DAC來檢測電容陣列的匹配誤差,并把所檢測到的誤差存放在內部數據存儲器RAM中,在初始采集數據之前,要使AD676進行一次自動校準,在以后的轉換中,微程序控制器便使用RAM中的值來校準轉換所得的數字量而改善轉換精度。因此,AD676不需用戶校準或調整,能自動保持器件的高性能。
AD676內部的所有功能,包括實際的逐次逼近算法、自動校準、采樣保持操作、內部數據的輸出鎖存都是在微程序控制下進行的。應用中,不需用戶增加額外的硬件和軟件開銷,給用戶帶來了很大的方便。
2 AD676的主要性能
(1).16位無丟失碼
(2).轉換速率100KSPS(總的轉換時間為10μS)
(3).自動非線性校準
(4).積分非線性誤差(1NL)士1LSB
(5).總的諧波失真(THD)0.002%
(6).片內具有采樣—保持功能
(7).滿功率帶寬1MHz.
(8).輸入模擬信號范圍士Vref
(9).供電范圍:Vdd = +5V士10%
Vcc = +12V士5%
Vee = -12V士5%
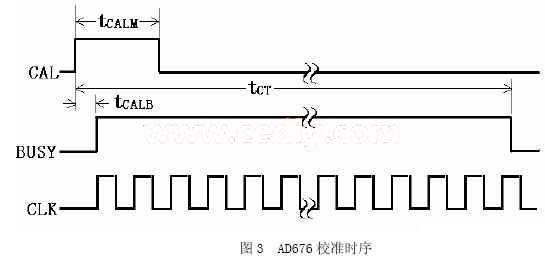
AD676采用28引腳DIP封裝和28引腳邊銅焊陶瓷封裝,封裝引腳見圖2。
3 AD676的時序
(1).校準時序
AD676通過片內自動校準過程不需用戶校對和調整便能達到規定的性能。校準過程只需在初始采集數據前進行一次即可,校準時序見圖3。
當給CAL加高電平時,AD676內部復位,BUSY輸出高電平,表明AD676已作好校準的準備。當給CAL加低電平時,校準過程開始,校準時間為85530個時鐘周期,完成校準的標志為BUSY變為低電平。在大多數應用場合下,僅在上電時有充分的時間對AD676進行校準,所以要特別注意,應等到電源和電壓基準穩定以后才能開始進行校準。
(2).一般的轉換時序
轉換由輸入信號采集過程和16位內部逐次逼近過程組成。
輸入信號采集過程:將SAMPLE線保持高電平狀態,保持時間ts≥2μS,再將SAMPLE線變為低電平,SAMPLE下降沿所對應的輸入電壓值Vin即為實際采樣值。SAMPLE為低電平后,輸入Vin與內部電容陣列斷開,輸入信號采樣過程結束。值得注意的是采樣期間AD676忽略掉輸入的時鐘脈沖,應用中為防止輸入時鐘脈沖對輸入信號干擾,采樣期間最好切斷時鐘脈沖的輸入。
16位逐次逼近轉換過程:在SAMPLE線變為低電平tsc時間后(tsc≥50nS)的17個時鐘脈沖內,AD676完成16位逐次逼近轉換過程,轉換期間BUSY變為高電平,轉換結束BUSY變為低電平。當BUSY變為低電平后,數據被輸出到BITl―BITl6引腳上,并一直保持到下一次轉換開始。因此,在BUSY變為低電平后到下一次轉換開始前的任何時刻都可以讀出本次轉換的結果數據。
4 AD676在測磁設備中的應用
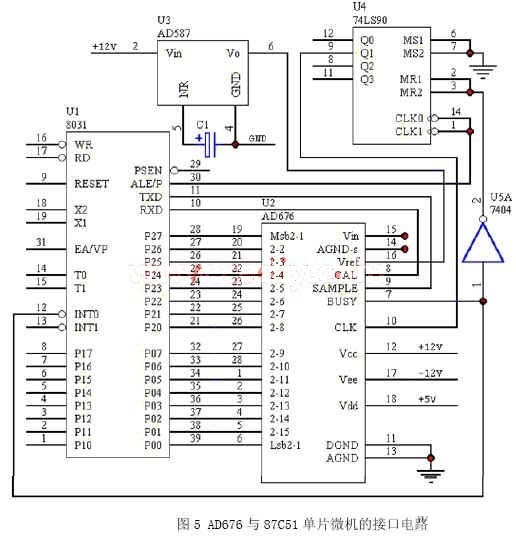
已成功地將AD676應用于艦船磁場高速數據采集系統中,這里介紹該系統中AD676與87C51單片微機的接口電路,接口電路如圖5所示。圖中將信號處理部分電路、電源處理部分電路及外圍電路等省去,旨在著重說明AD676的使用方法。
87C51單片微機內帶4K字節的程序存儲器EPROM。當不需進行外部程序存儲器擴展和數據存儲器擴展時,87C51的4個8位并行口P0、P1、P2、P3全歸用戶使用。因此用87C51與AD676接口,可設計出體積小、耗電省的艦船磁場高速高精度數據采集設備。也適用于對體積、功耗、速度和精度要求都很苛刻的場合。如油井探測、地震數據采集、貴重物重量測量及其它高精度測量儀器。
AD676的輸出不具備三態功能,但其輸出邏輯與CMOS和TTL兼容。因此可直接把AD676的BIT1―BIT16與87C51的P0口和P2口相接。若將AD676與8031接口,則應擴展兩個8位的輸入口,再將AD676的BIT1―BIT16經輸入接口引到8031的數據總線(P0口)上。校準控制CAL和轉換控制SAMPLE可接到P1或P3口的任一位上。例如由P3.0控制校準CAL,由P3.1控制轉換SAMPLE,轉換結束信號BUSY接外部中斷INT0。BUSY還控制時鐘脈沖信號的輸入,如5圖所示,當BUSY為低電平時,計數器74LS90將停止工作。圖中AD587提供10V的電壓基準。若采用5V的電壓基準,只要用AD586替代AD587即可。
由以上分析,不難編寫出AD676校準程序和數據采集轉換程序。校準程序段如下:
CLR P3.1;將SAMPLE保持低電平
SETB P3.0;作校準準備
CLR P3.0;開始校準
JB P3.2,$ ;等待校準
數據采集轉換過程可采用查詢方式或中斷方式編寫,采用查詢方式編寫的程序段如下:
SETB P3.1;接通Vin給電容陣列充電
NOP
NOP;等待2μs
CLR P3.1;啟動轉換
JB P3.2,$;等待轉換
MOV @R0,P2;存放高8位數據
INC R0
MOV @R0,P0;存放低8位數據
…
5 結束語
本文設計的AD676應用方法能充分發揮其內部的各項功能。如利用內部電容陣列在不外接采樣保持器的情況下便能對艦船磁場進行動態測量、利用內置的微控制器在測量前進行校驗便能獲得很好的線性度。利用其所具有的高分辨率能獲得很高的測量精度。AD676的應用簡化了電路設計,降低了制作成本,并有效地提高了艦船磁場測量系統的性能。

評論