基于虛擬儀器的遠控系統自動測試技術

虛擬儀器技術是現代計算機技術和儀器技術深層次結合的產物,是當今自動測試領域的一項重要技術。其核心是利用飛速發展的計算機技術,通過共享計算機內部的軟、硬件資源,編制、運行儀器軟件,建立圖形環境和在線幫助機制,完成數據分析和處理功能,用靈活的虛擬軟面板實現儀器的激勵、測試和控制功能[1,2]。
本文引用地址:http://www.104case.com/article/201612/333391.htm潛艇主機遠控系統是潛艇主機的自動控制、狀態監測和安全保護設備,是潛艇主動力系統的核心部件,它對潛艇動力系統的安全、可靠運行十分重要,關系到整艘潛艇的安全性,是保證潛艇在航率和完成戰斗使命的關鍵因素。因此,無論是在設計制造階段,還是在潛艇服役后的各等級維修階段,都必須對潛艇主機遠控系統的各項功能進行全面的測試,使其滿足戰技術要求。目前國內進行測試時只能采用人工操縱、經驗判別的方式,過程復雜且工作效率低。這種測試方法已經跟不上現代裝備維修保障工作的需要,更無法滿足現代高新技術裝備的測試要求[3]。有鑒于此,本文結合虛擬儀器的思想,研究了構建自動測試系統的具體過程,分析了實現過程中的關鍵技術,并研制出了某型潛艇主機遠控系統的自動測試系統。
1測試需求分析和總體方案設計
1.1測試需求分析
根據主機遠控系統的工作環境和測試工作的需要,所設計的自動測試系統應具有以下功能:
1)測試系統本身的自檢自校能力。
2)程序化自動測試和人工輔助測試功能。
3)能提供被測設備及其部件正常工作和故障診斷所需的激勵信號、模擬負載等環境條件。
4)能對主機遠控系統進行功能檢測和性能測試,測試結果應能直觀地顯示。
5)具有信號處理、故障分析、故障定位能力,故障點定位要盡可能具體、正確。
結合裝備的實際情況[1,3],對自動測試系統進行設計時,應該遵循以下基本原則:
1)以滿足部隊作戰需求、進步戰斗力為基本目標,保障武器裝備系統的質量和可靠性,進步可測試性和可維修性。
2)從軍用武器系統的角度出發,在ATS各層次、全壽命各階段堅持通用化、系列化、標準化的設計原則,降低全壽命周期用度、縮短研制周期。
3)應用模塊化的商品及其技術,采用集成化的構造方式,確保系統的先進性、開放性、擴展性,保證測試系統本身的可靠性和長期穩定性。
4)應用人工智能技術,研究故障診斷理論和方法,進步故障診斷和隔離水平,建立有效的故障診斷系統。
1.2自動測試系統總體方案設計
自動測試系統的基本思想是:向被測對象送出測試矢量,接收對象在該測試矢量激勵下的響應信息,再根據激勵與響應之間的關系分析并“決策”和“產生”下一個激勵信號,如此進行下往,最后對激勵序列和響應序列進行分析和處理,判定被測試對象的功能是否正常,進而進行故障分析和故障定位。
在具體分析主機遠控系統的工作原理的基礎上,結合國內外自動測試技術的先進思想[4~6],根據測試需求,確定本文研究的自動測試系統的總體測試方案如下:
1)整機性能測試。針對控制系統整機的所有工作狀態,仿真整個控制系統的所有輸進信號,檢測其輸出信號,判定整機功能是否正常,如有故障,初步確定系統的故障性質與部位。
2)分機性能測試。根據各分機的工作原理和功能,仿真各分機的所有輸進信號,檢測其輸出信號,判定各分機的功能是否正常。
3)故障設備的故障診斷。在工控機的控制下,根據需要向故障設備送出故障診斷激勵矢量,通過采集關鍵電子元器件的響應信號,運用公道的故障診斷方法尋找故障源,將故障定位到回路,并盡可能定位到元器件。
2系統硬件設計
2.1遠控系統硬件組成
潛艇主機遠控系統由原動機遠控裝置、離合器保護和信號裝置、電源和信號裝置、原動機狀態復示裝置組成,各部分的連接關系及與潛艇上其它設備的連接關系如圖1所示。虛線部分為潛艇主機遠控系統。
遠控系統各部分的主要功能如下:
1)原動機遠控裝置。在原動機處于遠控狀態時,完成原動機的盤車、吹車、啟動、調速、正常停車、應急調節器停車、應急保護停車等功能,顯示原動機的運行狀態、報警信號、停機信號,并與離合器保護和信號裝置一起對原動機進行安全保護。
2)離合器保護和信號裝置。顯示氣動輪胎離合器的狀態,接受全艇控制系統的信號并向其反饋信號,與原動機遠控裝置一起對原動機進行安全保護,并與電源和信號裝置一起控制整個遠控系統的工作狀態。
3)電源和信號裝置。將潛艇所供的電源處理后,根據遠控系統的工作狀態將電源分配到其它裝置,并與離合器保護和信號裝置一起控制整個遠控系統的工作狀態。
4)原動機狀態復示裝置。根據原動機遠控裝置中各量的狀態對原動機的運行狀態、報警信號、停機信號等進行復示。
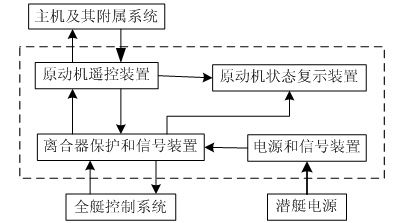
圖1遠控系統組成及與其它設備的連接關系
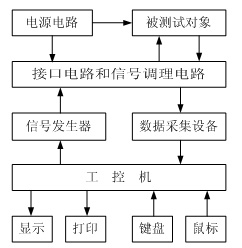
圖2自動測試系統硬件組成示意圖
2.2自動測試系統硬件組成
虛擬儀用具有硬件少、體積小、重量輕、功能強、可擴充性強等優點。與傳統儀器一樣,虛擬儀器可以劃分為數據采集與控制、數據分析與處理、結果表達與輸出三大功能模塊。結合虛擬儀器的思想[2,7],設計自動測試系統的硬件實現方案如圖2所示。
圖2中被測試對象是待測試的遠控系統整機或者某一分機。電源電路向遠控系統和信號調理電路供電,其中遠控系統需要的是特殊的電源,需要購買專門的電源或者自行設計電源變換電路。
為了實現遠控系統整機或分機的自動測試,需要為其設計專門的接口電路和信號調理電路,信號發生器、數據采集設備和被測試對象之間的所有信號都通過它傳遞,其主要作用有:①將信號發生器發出的信號(模擬量、數字量等)根據需要轉換成遠控系統所能接受的信號;②將遠控系統產生的信號(模擬量、數字量等)轉換成數據采集設備所能接受的信號。
信號發生器的主要作用是:在工控機的控制下產生相應的信號,經信號調理電路轉換后送到遠控系統,即產生激勵矢量。
數據采集設備的主要作用是:在工控機的控制下,采集遠控系統在激勵矢量作用下的響應信號(經過信號調理電路轉換),然后將信號送到工控機進行數據分析和處理。
工控機在軟件的指揮下控制整個自動測試系統的運行,也是人機交互的主要途徑,它根據需要控制信號發生器向遠控系統發出激勵矢量,同時將遠控系統的響應矢量進行數據分析和處理,判定被測對象的功能是否正常并對其進行故障診斷,最后將判定結果及診斷信息通過顯示設備進行顯示或通過打印機進行打印。
3自動測試系統的軟件設計
虛擬儀器的軟件開發環境目前主要有兩類:一類是文本式的編程語言,如VisualC++、VisualBasic、C++、LabWindows/CVI等;另一類是圖形化編程語言,具有代表性的有LabVIEW、HPVEE等[8]。圖形化編程語言和文本式編程語言相比,具有編程簡單、直觀、開發效率高的特點;而文本式編程語言靈活性較好,用戶可以靈活的添加功能,而且比圖形化編程軟件開發本錢低。考慮到本自動測試系統有大量的信號仿真、信號檢測、數據處理,而且需要有大量的圖形界面處理,選擇LabVIEW作為軟件開發平臺。程序框圖如圖3所示。
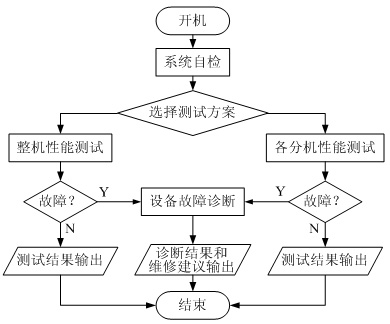
圖3自動測試系統軟件程序框圖
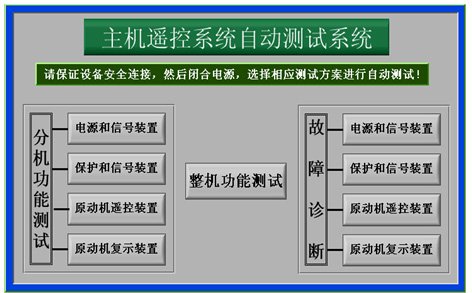
圖4自動測試系統主界面
系統開機后,首先進行測試系統本身的自檢,如無異常,進進自動測試系統主界面,如圖4所示。用戶可以根據需要選擇測試方案,測試方案分為以下三種:
1)整機功能測試。點擊主界面上的“整機功能測試”按鈕進進整機功能測試主界面。當控制系統的所有設備正常連接時,針對控制系統整體的所有功能(電源變換功能、信號指示功能、原動機控制功能、遠控和保護功能),仿真模擬被控對象的工作過程,按照程序設置送給控制系統所需的輸進信號,檢測其輸出信號,根據輸進矢量和輸出矢量之間的關系判定整機功能是否正常。假如功能測試不正常,則控制系統有故障,將故障定位到分機。
2)分機功能測試。在“分機功能”測試區點擊分機名稱按鈕進進相應分機的測試界面。根據該分機的工作原理和功能,仿真模擬被控對象的工作過程和與其相聯系的其它分機的耦合信號,按照程序設置送給該分機所需的輸進信號,檢測其輸出信號,根據輸進矢量和輸出矢量之間的關系判定該分機功能是否正常。若不正常,則該分機有故障,視具體情況可以初步確定該分機的故障性質和故障部位。
3)故障設備的故障診斷。當通過“整機功能測試”或“分機功能測試”判定出某個分機故障時,就要對該分機進行具體的故障診斷。故障診斷時可以采用各種公道、先進的故障診斷方法搜尋故障的原因,盡可能將故障定位到元器件,進步故障診出率,并盡量減少漏報和誤報現象。本系統中采用以故障樹分析法為主、模糊神經網絡推理為輔的診斷方法。對故障設備故障樹的構造,采取理論與實踐相結合的方法,即在具體分析其工作原理的基礎上,結合大量的人工診斷的經驗,構造公道的故障樹。故障診斷時,先將故障樹結構存進計算機中,然后采取自上而下的方式進行故障搜尋和定位,測試時,工控機根據需要不斷向故障設備送出故障激勵矢量,同時采集關鍵電子元器件的響應矢量,根據激勵矢量和響應矢量的關系進行故障定位。當需要輔助推理時,采用模糊神經網絡推理方法,終極搜尋到故障的真正原因。當需要人工輔助時,軟件會提示用戶進行輔助測試,并提示人工輔助的方法。
4結論
本文具體分析了構建基于虛擬儀器的自動測試系統的各個環節,研究了實現過程中的關鍵技術。并以LabVIEW為開發環境,開發出了某型潛艇主機遠控系統的自動測試系統,該自動測試系統能夠實現遠控系統整機和各分機的性能測試,并能夠對故障設備進行具體的故障診斷。實際使用表明,該自動測試系統功能完善、界面直觀、操縱簡便、故障診出率高。
本文作者創新點:
1)研究了將虛擬儀器技術應用于遠控系統自動測試過程中的關鍵技術。
2)通過公道整合軟、硬件資源,將上述技術應用于實際,研制出了某型遠控系統整機和各分機的自動測試系統。
參考文獻
[1]黃智剛.機載無線電設備自動測試系統關鍵技術研究[D].北京:北京航空航天大學,2002.
[2]GuiehuW..Virtualinstrumentsandtheirapplicationinexperiments[J].Proc.ofICEMI,1997:582-584.
[3]GJB2547-95,裝備測試性大綱,1995.
[4]朱大齊.航空電子設備電子設備故障診斷技術研究[D].南京:南京航空航天大學,2002.
[5]L.EWang,K.C.Tall,X.D.Jiang,etal.Aflexibleautomatictestsystemforrotating-turbinemachinery[J].IEEETransactionsonAutomationScienceandEngineering,2005,2(1):1-18.
[6]鄒明虎,王志云,高福生等.基于模糊神經網絡的雷達印制板智能故障診斷系統研究[J].微計算機信息,2004,20(12):12-26.
[7]陳光禹,毛繼宏,林春勛.現代電子測試技術[M].北京:國防產業出版社,2000.
[8]曹玲芝.現代測試技術及虛擬儀器[M].北京:北京航空航天大學出版社,2004.

評論