CAN總線在混合動力汽車中的應用研究

引言
本文引用地址:http://www.104case.com/article/201612/332331.htm上世紀90年代以來,隨著對汽車功能要求的不斷提高和汽車控制技術的發展,在汽車設計領域,CAN總線幾乎成為一種必須采用的技術手段,不僅在一些高級轎車,而且在經濟型轎車中進入了實用化階段。CAN總線規范是目前唯一有國際標準的現場總線,并得到Intel、Motorola、Philips、TI、Infineon等許多半導體制造廠商的支持,推出各種集成有CAN協議的產品。
CAN總線不僅用于汽車電氣系統的現場總線,而且由于網絡控制的發展以及它所具有的優秀性能和高可靠性而越來越受到工業界的重視。
1 CAN總線的特點及通信協議
CAN總線是一種串行數據通信協議。在CAN總線接口中集成了CAN協議的物理層和數據鏈路層功能,可完成對通信數據的成幀處理。CAN協議廢除了傳統的站地址編碼,而代之以對通信數據塊進行編碼,數據塊的標識碼可由1 1位或29位二進制數組成。按數據塊的編碼方式,可使不同的節點同時接收到相同的數據;數據段長度最多為8個字節,可滿足通常工業領域和汽車行業中控制命令、工作狀態以及測試數據的一般要求,保證通信的實時性;CAN協議采用CRC校驗并可提供相應的錯誤處理功能,保證數據通信的可靠性;采用非破壞性仲裁技術:當多個節點同時向總線上發送信息出現沖突時,優先級較低的節點會主動退出發送,而最高優先級的節點可不受影響繼續傳送數據,從而大大節省了總線沖突仲裁時間,尤其在網絡負載很重的情況下,也不會出現網絡癱瘓。
CAN通信協議規定了4種不同的幀格式,即數據幀、遠程幀、錯誤幀和超載幀。基于以下基本規則進行通信協調:總線訪問、仲裁、編碼/解碼、出錯標注、超載標注。
J1939是一種支持閉環控制的在多個ECU之間高速通信的網絡協議。在CAN總線通信協議2.OB之上具體實現了應用層,成為載貨車和大客車廣泛使用的通信標準。任何遵循同一J1939/0X(X=1,2,...,用來表示不同的版本或應用范圍)文件規定的電子控制單元(ECU)均可通過網絡實現通訊。SAEJ1939使用PDU(用于確定分配到數據域的參數組編碼)封裝和實施CAN的標準格式(表1),具體定義如下:協議數據單元PDU由優先權P、參數組號(PGN)、源地址SA和數據DATA組成。參數組號PGN又由保留位R、數據頁DP、PDU格式PF和PDU特性域PS組成。J1939/71應用層文檔定義了車輛控制的各種參數及命令的PGN。本文參考J1939協議,采用29位ID的編碼方式。
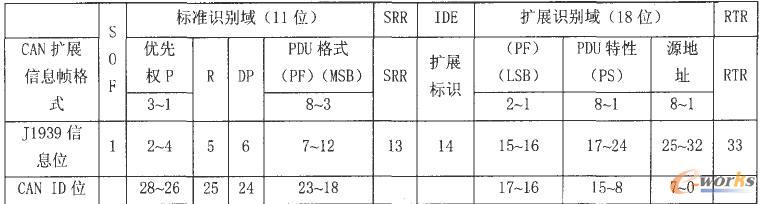
表1 SAE J1939的PDU封裝格式
2 基于CAN通信的XL2000輕度混合動力控制系統實現
2.1 XL2000輕度混合動力系統原理框圖及控制網絡要求
系統在臺架上的調試原理如圖1所示。原夏利2000的4缸1.3L汽油機換成3缸1.OL TJ376QE汽油機,該汽油機的飛輪被替換為一個10kW永磁電機,既可以工作在電動模式提供輸出扭矩也可以工作在發電模式提供電能。發動機的節氣門被改造為電控節氣門,接受主控制器控制。主控制器通過控制電控節氣門開度和管理電控噴油器功率回路,實現對發動機的力矩控制和啟停管理。主控制器、電機控制器和電池管理系統通過CAN總線交換信息,以實現傳感器測量數據的共享、控制指令的發送和接收等,并執行各自的控制功能,從而提高系統的控制性能。它們之間的通信與信息類型為信息類和控制類。
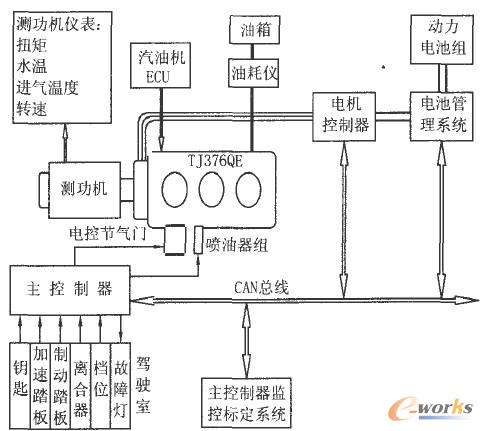
圖1系統調試原理框圖
2.2節點設計
考慮開發的便利性、快速性以及成本的考慮,盡量發揮各自的開發優勢,系統中使用的控制器有Motorola公司的M68376、TI公司的DSP內核芯片TMS320LF2407和Cygnal公司的增強型C8051F020單片機。前兩種單片機集成有CAN控制器模塊,CAN和微控制器之間通過芯片內部總線交換數據;而后一種控制器無CAN接口,采用獨立的CAN控制器SJAl000,以適應C805 1F020單片機,通過并行數據口交換數據信息。CAN的外圍器件采用82C250收發器增強總線驅動能力,采用光耦6N137在電氣與總線隔離,具有較強的抗干擾能力,起到安全保護作用。

評論