基于CAN總線控制伺服的碼垛機器人系統

2 CANopen的工作模式
TSX Micro PLC通過CAN總線控制Lexium05伺服有兩種工作模式:PDO模式和SDO模式。
(1)PDO模式固定數據交換模式(PDO),實時接收和發送過程數據的過程數據載體,它可以通過PLC標準內部字進行輸.K/輸出%MW,傳輸的數據一般為速度、位置 等的控制字。PLC在與Lexium05伺服驅動器交換數據前,首先要組態系統的控制結構,其中Master為主設備節點,這里是TSX Micro的PLC為主節點,其下的伺服驅動器為從設備節點,同時把Lexiurn05伺服的ESD文件加到總線的設備上。
(2)SDO模式直接數據交換模式(SDO),通過讀/寫載體字典與總線上設備進行通訊,它不是實時的,可以通過READ—VAR和WRITE—VAR進行輸Ⅳ輸出,傳輸的數據一般為運動模式(點到點、速度、尋原點等),用戶可以根據實際需要選擇伺服電動機的運動模式。因為模式一般在一段時間內不被修改,用SDO模式時。只有用戶要求時才發送和接收數據,此時通信是非周期的。
(3)CANopen總線的組態采用連續周期模式(PDO),在通訊組態軟件Sycon中搭建主站、從站結構,并對每個驅動器配置PDO,每個設備有接收和發送各4組PDO,前3組是對應圊定含義的,第4組是任意定義的,可以修改。每組PDO是8個字節。每個設備結點都需要PDO組態,以完成整個系統結構的搭建,形成后綴為.CO的結構文件并保存。在進行絕對定位時,以與軸點之間的絕對位置來確定定位行程,在第1次進行絕對定位之前,必須通過找零定位模式來定義零點。進行相對定位時,以與當前軸位置或者目標位置之相對位置來確定定位行程。
(4)點到點運行模式在機器人控制系統中,常用到的就是點到點定位,這種模式僅當采用現場總線控制方式時才可以用,且僅可通過現場總線的方式來執行運行模式。在該運行模式中,使用可進行設運動特征的曲線來執行從起始位置到目標位置的運動。目標位置可以設定相對位置和絕對位置,如圖2所示。
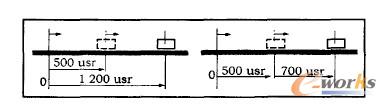

圖2絕對定位與相對定位
在進行絕對定位時,以與軸點之間的絕對位置來確定定位行程,在第1次進行絕對定位之前,必須通過找零定位模式來定義零點。進行相對定位時,以與當前軸位置或者目標位置之相對位置來確定定位行程。
3 結語
通過CAN總線控制伺服設計的機器人系統,接線簡單,抗干擾能力強,故障率低,大大提高了該線的生產效率,也同時降低了工人的勞動強度,得到用戶一致好評。

評論