微位移步進電機控制系統設計

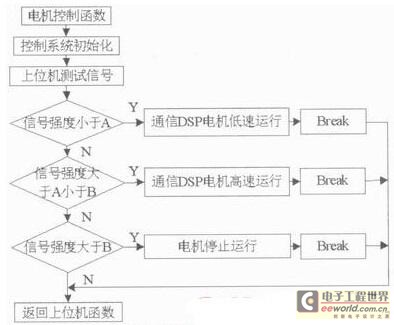
圖5 系統控制程序流程圖
4系統調試分析
4.1 PWM脈沖調制分析
圖6為DSP輸出的脈沖波形和其相對應的參數,通過修改參數值可以實現對脈沖頻率的改變,并且可以通過DSP的點對輸出控制電機的運行。通過調試分析能夠很好地實現實驗目的,持續地改變電機的運行狀態。
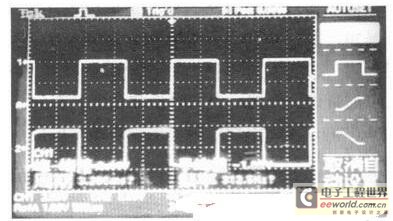
圖6 PWM脈沖調試
4.2控制精度調試
本系統采用電機推動絲桿移動裝置。絲桿采用的是滾珠絲杠,其為一種將回轉運動轉化為直線運動的理想的產品。
本系統選用的電機的最小步進角為1.8°故控制精度調試實際就是絲桿精度的調試,本系統選用的絲桿的額定扭矩為4N.m,最小角位移對應線位移為10μm.
系統總體調試:
現階段系統調試結果為通過按鍵和程序控制能夠很容易地實現電機的運行,能夠通過計算得出電機的運行角速度并送液晶屏顯示當前過程量。連接好絲桿的電機能夠實現對傳感器的推動。通過上位機對傳感器信號強度的實時監測,系統能夠基本滿足設計目的,即系統能自動并有效地進行最佳信號點的檢測,達到對物塊的精確定位。
5小結
本系統從實際工程背景出發,旨在為實驗室某項目提供技術支持。通過對系統的設計和調試能夠從理論上實現項目目的,達到控制要求。通過硬件選型、軟件設計、控制方案研究和實際調試分析,系統能夠達到預期設計目的。然而本系統還存在一些問題有待解決,因本系統是配合項目其他模塊而設計的,而其他模塊尚在調試階段,測試數據不精確,故電機系統控制方案設計模塊還有待提高,將在后續項目進程中進一步研究。本系統當前研究成果能夠適用于對控制精度要求不高的場合,因系統的控制方法比較簡單、系統結構簡潔,有一定的應用價值。

評論