智能機器人保姆

1.前言
隨著科學(xué)技術(shù)的進步,機器人技術(shù)在國內(nèi)外已經(jīng)得到了較好的發(fā)展。例如美國REMOTEC公司設(shè)計研制的F6-A防爆機器人,它采用活節(jié)式履帶,能夠跨越各種障礙,在復(fù)雜的地形上行走。速度為0-5.6公里/小時,無級可調(diào),完全伸展時,最大抓取重量11公斤,配有三個低照度CCD攝像機,可配置X光機組件(實時X光檢查或靜態(tài)圖片)、放射/化學(xué)物品探測器、霰彈槍等等。可用于排爆、核放射及生化場所的檢查及清理,處理有毒、有害物品,特警行動和機場保安。中國也由類似的遙控機器人,例如RAPTOR排爆機器人,外形緊湊、堅固可靠,可在會場過道、飛機機艙中自如活動,在各種大型機器人無法進入的狹窄環(huán)境中執(zhí)行任務(wù)。附加攝像機,喊話器,放射線探測器,毒品探測器,散彈槍,各種水炮槍,探照燈等;模塊化設(shè)計,所有部件可迅速拆裝;遙控/線控可選,遙控距離300 -500米,線控距離100米。該機器人重量達49kg(全配置),最高速度20 米/ 分鐘(合12千米/小時),配備有3臺CCD攝像機,其中一臺具有10 倍光學(xué)變焦,可滿負(fù)荷連續(xù)工作 2 小時以上,4關(guān)節(jié)機械手抓持能力達5-15公斤。
本作品設(shè)計一個能夠在人工采用無線干預(yù)的方式下完成取物工作的機器人保姆。主要是通過檢測使用者手動作時產(chǎn)生的肌電信號以及手指運動情況來控制該機器人保姆,使該機器人保姆幫助使用者去遠處(使用者視野不能達到的80M范圍內(nèi))提取某些物品,然后在不需要使用者再次控制的條件下機器人保姆能夠?qū)⑺〉奈矬w自主地運送回原出發(fā)地,交給使用者。在前往目的地時使用者可以通過機器人保姆的無線視頻功能對機器人保姆的運行情況以及機器人周圍環(huán)境信息進行監(jiān)視。
2.總體設(shè)計
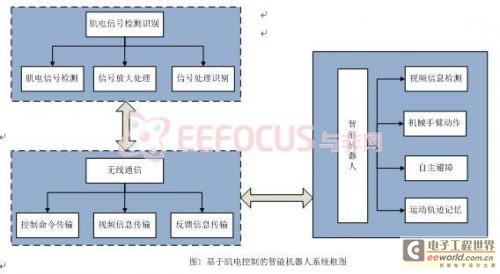
本作品采用模塊化設(shè)計思想,按照本設(shè)計主體部分可以分為三大部分:肌電信號檢測識別、無線通信設(shè)計、智能機器人設(shè)計。
- 肌電信號檢測識別
該部分主要是通過采集人手動作時手臂表皮勢電信號,通過信號放大以及控制算法的處理,將檢測到的信號進行相關(guān)處理,最后得出人手相應(yīng)的動作。主要是涉及到的技術(shù)有微弱信號檢測、微弱信號放大、數(shù)據(jù)信息處理等技術(shù)。
無線通信設(shè)計
該部分主要是通過無線傳輸來實現(xiàn)上位機與智能機器人之間的數(shù)據(jù)交流——上位機的控制命令的發(fā)出,智能機器人視頻信息的上傳等。主要是涉及技術(shù)有無線通信電路設(shè)計、無線視頻傳輸設(shè)計等。
智能機器人
該部分主要是通過一個機器人的機械手臂能夠在上位機的控制下完成取物操作,完成取物操作后,能夠自主的返回到出發(fā)點,這過程中需要改機器人具備自主避障、視頻信號的無線傳輸、記憶運動軌跡等功能。
總體設(shè)計框圖如圖1所示:
2.1 肌電信號檢測設(shè)計
本設(shè)計中采用雙通道的信號采集的方式,采用紐扣作為肌電信號采集的電極,使用微弱信號放大器并采用差分放大配置方式對信號進行放大;然后利用帶通濾波和工頻陷波技術(shù),對噪聲信號和工頻干擾進行處理。將采集到的模擬信號通過A/D轉(zhuǎn)換讀入單MCU,在MCU上實現(xiàn)體表電生理信號的時域分析功能,獲取相關(guān)的時域參數(shù)(如信號峰值等)提供給下一級模塊使用。其設(shè)計框圖如圖2所示:
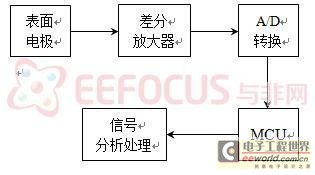
圖2 肌電檢測設(shè)計框圖
2.1.1 差分放大設(shè)計
由于人體肌電信號非常弱小,因此需要采用信號放大才可以通過ADC采集到肌電信號,采用分二級放大方式,前級采用AD620進行一級微弱信號的放大處理,第一級放大增益并不高只有約100倍,我們主要的目的是要把體表信號盡可能完整的取出,并且不要在進入二級放大之后由于二級輸入信號過大而造成最后的信號失真。因此需要在前級放大之后需要帶通濾波。第一級放大電路如圖3所示:
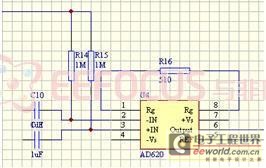
圖3 第一級放大電路圖
在進行帶通濾波電路設(shè)計之前,我們是采用的仿真來設(shè)計出最佳的帶通濾波電路,最后得到仿真電路如下圖4所示:
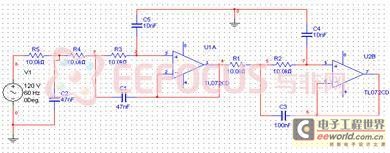
圖4 帶通濾波電路仿真圖
最后進入二級放大,但是設(shè)計中發(fā)現(xiàn),通過兩級放大后,會有很多干擾摻雜進入檢測信號中,因此還需要進行調(diào)理,設(shè)計中利用TL072芯片設(shè)計了這一陷波電路,專門處理工頻帶來的噪聲。其電路具體實現(xiàn)如下圖5所示:
圖5 陷波電路設(shè)計
2.1.2 軟件設(shè)計
本設(shè)計首先是采用單片機進行編寫調(diào)試該部分,主要完成的工作是進行信號的AD采集。設(shè)計中在AD采集數(shù)據(jù)過后還采用了均值法進行的再次的處理,這樣得到的信號值更加準(zhǔn)確。具體程序設(shè)計流程圖如圖6:

圖6 信號采集軟件流程圖
2.2 無線通信設(shè)計
在本設(shè)計中,無線通信分為兩個部分,一個部分是數(shù)據(jù)信號(控制命令)通信,一個是視頻通信。數(shù)據(jù)通訊模塊采用APC220多通道微功率嵌入式無線數(shù)傳模塊,該模塊是高度集成半雙工微功率無線數(shù)據(jù)傳輸模塊,其嵌入高速單片機和高性能射頻芯片。創(chuàng)新的采用高效的循環(huán)交織糾檢錯編碼,抗干擾和靈敏度都大大提高,最大可以糾24bits連續(xù)突發(fā)錯誤,達到業(yè)內(nèi)的領(lǐng)先水平。視頻通信采用2.4GHz 無線音視頻模塊,2.4GHz和433MHz一樣是一個公共頻道,主要是開放給工業(yè),科學(xué)、醫(yī)學(xué)三個主要機構(gòu)使用,不需授權(quán)即可使用,2.4GHz技術(shù)空中通信速率快,可達到2M/S,能滿足視頻傳輸對傳輸速率的要求,在本設(shè)計中,攝像頭采用普通的CCD倒車?yán)走_攝像頭,水平成像角度為150度,攝像頭輸出的是標(biāo)準(zhǔn)的AV制式的信號,該信號直接連入視頻發(fā)射模塊,整個部分沒有和單片機相連接,這樣即使單片機在使用過程中出現(xiàn)問題,系統(tǒng)也能繼續(xù)傳輸圖像。
該部分都是采用現(xiàn)成模塊而設(shè)計的,這樣使用方便,而且穩(wěn)定可靠。在軟件設(shè)計上只需要對數(shù)據(jù)通信部分進行簡單操作即可完成。
2.3 智能機器人設(shè)計
智能機器人的硬件主要設(shè)計部分在于機械手臂與攝像頭的設(shè)計,其軟件設(shè)計主要是遙控器部分、攝像頭部分等的設(shè)計,下面主要來介紹著這幾部分的設(shè)計。
2.3.1 機械手設(shè)計
1)機械手硬件設(shè)計
機械手是本設(shè)計的關(guān)鍵部分,機械手要完成一個抓取動作,需要有多個關(guān)節(jié)和一個可控制的夾持器,在機械手的關(guān)節(jié)設(shè)計上,模仿了人的手臂的工作方式,機械手有三個關(guān)節(jié)分別對應(yīng)肩關(guān)節(jié)、肘關(guān)節(jié)、腕關(guān)節(jié),其中肩關(guān)節(jié)使用一個金屬齒輪舵機和一個塑料舵機分別控制機械手的兩個自由度,肘關(guān)節(jié)使用一個金屬齒輪舵機控制一個自由度,腕關(guān)節(jié)使用兩個塑料舵機控制一個自由度和一個夾持動作。這五個舵機能在信號的作用下,同時協(xié)同工作,完成爪持的動作。所有關(guān)節(jié)與水平面成垂直關(guān)系時,安裝時定義為舵機的零角度附近,這樣每一個關(guān)節(jié)都能執(zhí)行±90°的運動,關(guān)節(jié)的運動關(guān)系和對應(yīng)關(guān)系如圖7所示。

圖7 機械手設(shè)計示意圖
2)機械手的控制部分設(shè)計
本設(shè)計采用的是舵機來控制,舵機的工作原理是控制電路板接受來自信號線的控制信號,控制電機轉(zhuǎn)動,電機帶動一系列齒輪組,減速后傳動至輸出舵盤。舵機的輸出軸和位置反饋電位器是相連的,舵盤轉(zhuǎn)動的同時,帶動位置反饋電位器,電位器將輸出一個電壓信號到控制電路板,進行反饋,然后控制電路板根據(jù)所在位置決定電機的轉(zhuǎn)動方向和速度,從而達到目標(biāo)角度后停止,這樣,實現(xiàn)了舵機角度的閉環(huán)控制。舵機的輸入線共有三條,紅色中間,是電源線,一邊黑色的是地線,這輛根線給舵機提供最基本的能源保證,舵機的第三根線是信號線,本設(shè)計中用到的舵機控線為白色或者黃色,舵機的控制信號時基脈沖周期是20ms的脈寬調(diào)制(PWM)信號,其中脈沖寬度從0.5ms到2.5ms,相對應(yīng)舵盤的位置為0-180度,呈線性變化,其對應(yīng)關(guān)系如圖8所示。
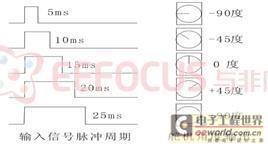
圖8 舵機輸出角度與脈沖周期關(guān)系圖
3)機械手電路設(shè)計
采用的是當(dāng)機械手舵機在工作時,需要5V供電電壓,同時工作的電流大概是2~3A,在
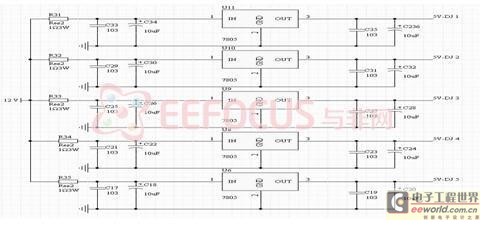
圖9 機械手電路設(shè)計
本設(shè)計中,使用的電池是12V的硫酸鉛蓄電池,為了滿足供電的需要,設(shè)計中采用5個KIA7805芯片將12V的電壓轉(zhuǎn)換為5V的電壓,分別為5個舵機供電。電路原理圖如圖9。

評論