CAN物理層調試基礎知識及舉例

圖10:帶有損壞CANH線路的CAN演示系統
圖11所示CANH信號表明了該損壞PCB線路的效果。另外,DMM連續性檢查也可證實該開路。
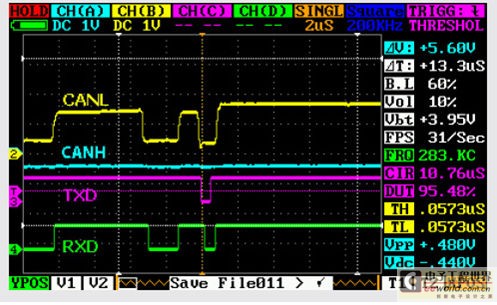
圖11:PCB上CANH線路遭損壞的TI CAN信號
圖 11還突出詳細顯示了CAN幀的另一個重要部分,即ACK位。示波器使用單一模式,在某個單比特發現觸發器時,其在右手節點的TXD引腳上被觸發。該單比特為這一節點產生的ACK位,目的是確認接收到一個有效的CAN幀。所有接收節點確認收到發送節點的CAN幀。相比在TXD上看到的發送ACK位,總線上所看到的ACK位的位時間稍長。這是同時發送ACK位的多個節點的假象。影響這種長位時間的一些因素包括:通過線纜的5ns/m延遲、三個CAN節點之間的時鐘計時漂移以及同時發送一個ACK位的兩個節點所產生的高差分電壓。如果這些因素使ACK位(空檔)變得更長,并在ACK分隔符內保持顯性,則其可能引起CAN誤差幀。
CAN總線調試的另一個例子是,在某個系統中,只有非常慢的CAN數據速率(比特計時)才會起作用。把一個示波器連接至TXD引腳,在TXD輸入端顯示出非常慢的上升時間,如圖12所示。1Mbps的CAN數據速率下,9.6μs計時延遲相當于10比特。它的根本原因是:我們正使用一個具有開路漏極的微處理器來驅動收發器的TXD引腳。在這種情況下,沒有真正的邏輯高電平驅動。僅有CAN收發器的弱內部上拉正驅動TXD引腳高,因此它的RC時間常量非常長。通過在TXD引腳上添加一個上拉電阻器,便可輕松解決這個問題。
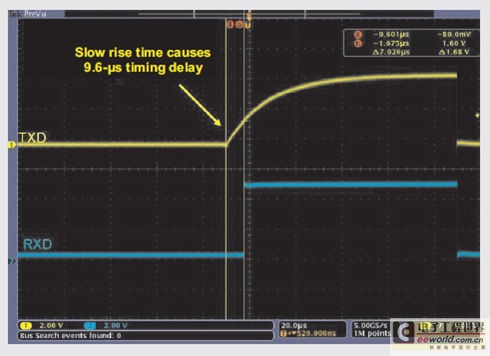
圖12:TXD引腳上慢上升時間例子
結論
本文介紹的CAN物理層基礎和調試舉例,應該讓您不那么懼怕進入CAN世界了吧。利用本文提供的其他一些參考資料以及相應的數據表,設計人員應該可以馬上讓其CAN系統正常運行了。

評論