汽車車牌定位識別完整設計

1 摘要
該項目要求基于FPGA完成車牌定位算法。本項目擬充分發掘FPGA并行運算在圖像處理領域的優勢,實現基于Adboost算法的車牌檢測硬件架構,最終完成車牌定位信息的實時輸出。
2 系統原理和技術特點
2.1 Adaboost車牌定位算法原理
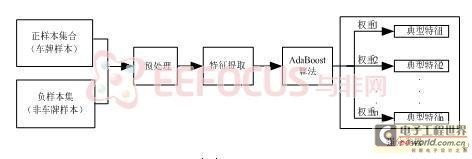
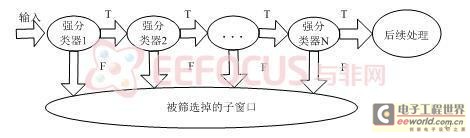
Adaboost車牌定位算法的設計,分為離線訓練模塊和在線識別模塊如圖1所示,離線訓練模塊通過對大量正、負樣本的學習,形成一系列的弱分類器(典型特征),然后依據權重把這些弱分類器組合成強分類器,如圖2(a)所示。實際應用時,若干個強分類器構成如圖2(b)所示的Cascade結構,Cascade結構就像一個篩孔可變的篩子,開始的篩孔很大,使得大多數車牌都能通過,在此基礎上盡量拋棄反例,位置越靠后的篩孔越復雜,即包含越多的弱分類器,因而也具有更強的分類能力。在線檢測模塊通過離線訓練模塊訓練好的Cascade結構分類器,使用可以縮放的Haar特征,在待識別圖片上進行多尺度的掃描,最后經過后續處理輸出識別結果(車牌位置信息)。在線檢測算法流程如圖3所示。首先檢測當前窗口,若未通過分類器則跳出;若通過所有分類器則判定為車牌,然后檢測下一窗口。掃描完當前圖像以后,放大檢測窗口,重新掃描。
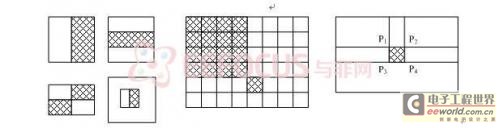
Adboost車牌定位算法基于Haar特征,Haar特征由一組矩形構成,圖4所示就是幾種Haar特征,黑白矩形內像素的灰度加權和是該特征的特征值。積分圖表示其圖像中任意一點,都是原始圖像中行號和列號均小于該點的像素點像素值之和。利用積分圖可以快速計算矩形的灰度和,即Sum=P1 +P4-P2-P3,其中Pi是積分圖中矩形頂點對應的積分值。多個Haar特征組成一個分類器,多個分類器級聯可以提高檢測精度。
通過對近30000車牌樣本的離線訓練,本實驗室已經得到能夠適應復雜環境的Adaboost車牌特征(識別)庫,實現的Adboost車牌檢測算法在固定環境下拍照車輛圖像,車牌定位識別率可達99%。本次大賽將重點關注車牌Adaboost算法在線檢測的FPGA實現。
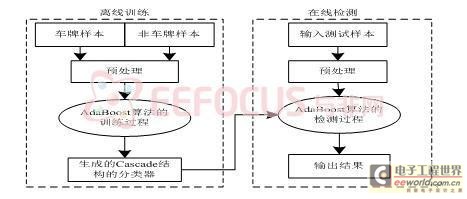
圖1 AdaBoost車牌定位算法框圖
(a)
(b)
圖2 (a)強分類器構造 (b)Cascade結構圖
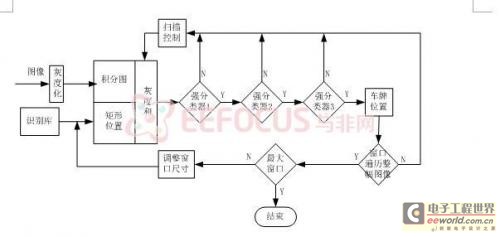
圖3 Adboost車牌定位算法流程圖
(1) (2) (3)
圖4(1)Harr特征 (2)積分圖 (3)灰度和
2.2系統工作原理
2.2.1 系統組成
如圖5,整個系統由FPGA完成車牌定位算法,配合外圍的視頻A/D,D/A、存儲器等芯片,完成圖像的采集和定位標記與原始圖像地疊加輸出。

評論