多功能旋轉式操作面板的設計與實現

隨著模擬技術的不斷發展,各類模擬器應用于軍用和民用許多領域,在人才培養、樣機研制等方面起到了重要作用,發揮出了重大的經濟效益和社會效益。在實踐中,由于經常會為同一系列的不同型號裝備、設備研制多套模擬器,從而導致造價高、存放空間利用率低等問題。研制適用于特定領域的通用模擬器是解決這些問題的很好思路。從裝備發展、模擬訓練、人才培養等方面分析了通用模擬器研制的必要性,并進行了可行性分析。設計了通用搜索雷達模擬器和衛星測控通用模擬器。
本文作者在進行某型艦艇電子裝備通用模擬器設計研制過程中發現,同一系列不同型號裝備的整體結構和外觀布局大體相同,主要區別在于局部操作元器件不同。為了實現模擬器的通用化,本文設計并實現了一種基于步進電機自動控制的多功能旋轉式操作面板。
1旋轉式操作面板硬件設計
1.1組成結構
旋轉式操作面板由元器件三面體、控制板、步進電機組件、旋轉體主軸、上位機組成。由控制板向步進電機組件發送控制指令,步進電機組件通過旋轉體主軸帶動元器件三面體實現操作面板的旋轉。工作流程如下:
(1)上位機軟件下發旋轉切換指令給控制板,使其發送步進脈沖信號和方向電平信號給步進電機組件。
(2)步進電機組件收到信號后,旋轉元器件三面體至合適位置,結束旋轉操作。
(3)用戶操作元器件三面體上的元件,操作結果上傳至上位機軟件,上位機軟件進行相應處理。
1.2元器件三面體設計
在某型艦艇電子裝備通用模擬器中,元器件三面體能夠實現三種不同類型的界面布局結構(見圖1)。元器件三面體的三個面分別記為A面、B面、C面。A面元件為五個按鍵;B面元件分別為兩個指示燈、一個蜂鳴器、一個按鍵和三個旋鈕;C面元件為四個旋鈕。

將元器件三面體上的元件信號通過數據線引至控制板,并實現與上位機的通信。為避免旋轉過程中數據線出現纏繞,選取某個操作面為基準操作面,其他兩個面采用往復雙向旋轉復位方式運行工作。
1.3控制板設計
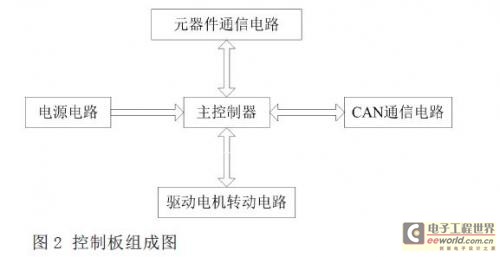
旋轉式面板控制板由主控制器、電源電路、CAN通信電路、驅動電機轉動電路、元器件通信電路組成(見圖2)。主控制器接收上位機指令,轉動元器件三面體至合適的平面位置。電源電路實現將12V轉換為5V,再將5V電壓轉換為3.3V供給給主控制器。CAN通信電路主要由CAN總線接口及CAN收發器組成,連接上位機并接收CAN通信指令。驅動電機轉動電路主要完成發送步進脈沖信號和方向電平信號至電機,驅動電機轉動,使其帶動元器件三面體轉動。元器件通信電路實現元器件與上位機通信。
2通信協議設計
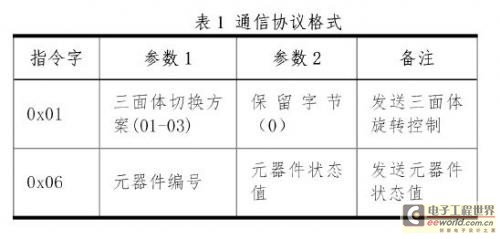
為實現上位機軟件與控制板軟件的通信,需要設計通信協議格式。通信指令分為兩類:
(1)上位機向控制板發送元器件三面體切換指令。
(2)控制板向上位機發送操作面板的元器件狀態指令。
通信協議格式見表1.
3軟件設計
3.1下位機軟件設計
下位機軟件主要實現接收上位機指令驅動電機轉動元器件三面體、掃描元器件操作狀態等功能。
3.1.1接收指令切換旋轉面板
判斷是否接收到指令,當接收到指令時轉Step2,否則繼續等待;設置步進脈沖信號和方向電平信號;將面板切換至合適的位置。
3.1.2掃描元器件狀態
啟動定時器,定時掃描元器件狀態;掃描元器件狀態是否發生變化,當發生變化時發送給上位機程序,否則繼續定時掃描元器件狀態。
3.2上位機軟件設計
上位機軟件采用面向對象技術,設計的重點是上位機通信類。CAN通信接口采用千目電子的USB-CAN轉換器,該產品附帶支持二次開發的動態庫。
利用VC++實現上位機通信類的編程,該類的功能主要是下發旋轉式操作面板切換方案、接收元器件狀態。該類主要包括設備初始化方法(InitCan)、數據發送方法(SendData)、數據接收方法(RecvData)。
InitCan方法
InitCan方法完成連接并打開CAN設備,輸入參數是CAN設備號、波特率,輸出值為布爾類型,標識CAN設備是否打開。
處理過程:
加載收發指令動態庫;
調用動態庫中的Init_can函數連接并打開CAN設備。
SendData方法
SendData完成下發指令功能,輸入參數是顯示指令,輸出值為布爾類型,標識發送是否成功。處理過程:
設置要發送的指令;
調用動態庫中的Can_send函數發送指令。
RecvData方法
RecvData完成接收指令和解析指令的功能。處理過程:
調用動態庫中的Can_receive函數接收指令;
根據通信協議進行解析,符合協議則處理,否則不處理。
4結束語
本文設計并實現了一種基于步進電機自動控制的多功能旋轉式操作面板,并應用于某型艦艇電子裝備通用模擬器的研制,較好地解決了同一系列不同型號裝備操作面板的模擬問題。該設計方案同樣適用于其他多功能機電設備的設計,可以為解決操作面板可用面積不足時的元器件布設問題提供很好的借鑒作用。

評論