基于CAN總線的模糊PID張力控制系統

引言
目前,CAN(controller ai'ca net)總線技術與PID技術作為一種成熟的技術被廣泛的應用于工業、紡織、汽車等領域。CAN總線技術又稱控制器局域網技術,是一種多主方式的串行通信總線技術,具有靈活方便、通信速率高、抗干擾能力強、可靠性高等優點,而被廣泛應用于工業遠距離數據采集與控制過程中。
PID技術作為一種目前廣泛應用的成熟技術,具有穩定性高、使用方便等優點,被廣泛應用于流量、溫度、液位控制等領域。但由于PID控制在受到外界干擾時,很容易導致超調過大甚至引起震蕩等缺點,從而使得該系統的動態性能及魯棒性變差。
本文通過結合CAN總線技術與模糊PID控制技術很好的解決了紡織機在送經過程中對經線張力的控制。通過CAN總線技術實現SH7047高速單片機與伺服驅動器來控制電機轉矩的目的,通過simulink的在線仿真證明了該系統具有很好的穩定性、魯棒性及可靠性等優點。
1 CAN總線系統控制原理
本文充分考慮系統的抗干擾性、可靠性及對現場設備的遠距離數據采集和控制通信等特點。設置了以SH7047高速單片機為主控芯片,實現上位機HMI及私服驅動器的控制。通過上位機友好的人機界面實現對整個織機運動過程的參數設置,例如(緯密度、張力值、編碼器的脈沖值等),如圖l所示,CAN總線高速高檔織機電控系統框圖。

圖1 CAN總線高速高檔織機電控系統框圖
2 模糊PID控制器的原理及實現
2.1 模糊PID控制器的原理
模糊PID控制是在傳統PID控制的基礎上對PID參數(K。K。KD)在線整定。通過輸入量的模糊化、模糊規則運算、反模糊化來實現對PID參數的整定。如圖2所示。
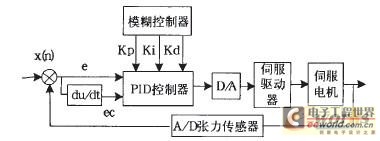
圖2模糊PID系統框圖
在實際系統中,動態送經張力控制是指織機運行時的張力控制。由于卷取的輸入值近似為一個常數,而在實際中,由于微分項對于快變信號很敏感,而紗線的張力變化是一個周期性的變化過程,在打緯的前后變化很大。這樣對于控制提出了很高的要求。在實際中我們可以考慮選用模糊PID控制的方法。模糊PID控制是基于模糊控制的基礎上通過根據不同的E和EC,對于K KI KD參數進行在線自整定,其結構由常規控制器及模糊推理兩部分組成。

評論