現場控制總線CAN網絡與有、無線網的轉換

1、系統組成
硬件設計由CAN通信接口與遠程通信接口兩部分組成。
CAN通信部分:CAN收發器、控制器。
遠程通信部分:GPRS通信模塊、TCP/IP協議轉換芯片。
兩部分共用一個單片機,模塊框圖如下:
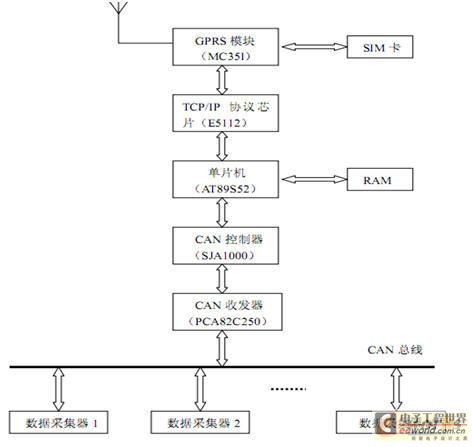
控制芯片采用51系列單片機,鑒于實際通信時,CAN總線采集數據速率比向GPRS發送數據速率要快,所以通過外擴RAM,作為數據緩沖,防止因數據傳輸的不同步而丟失數據。
總線節點上的數據采集器將數據采集以后發送給CAN數據收發器(PCA82C250),再由CAN控制器向單片機發出中斷請求,通過中斷處理程序,將CAN的數據楨信息存儲于片外RAM。
在通過GPRS發送前,必須將CAN的數據包封裝成符合TCP/IP協議棧的數據包格式,這時就需要TCP/IP 協議芯片(E5112),最后再通過GPRS模塊(MC351)將數據發送到終端。
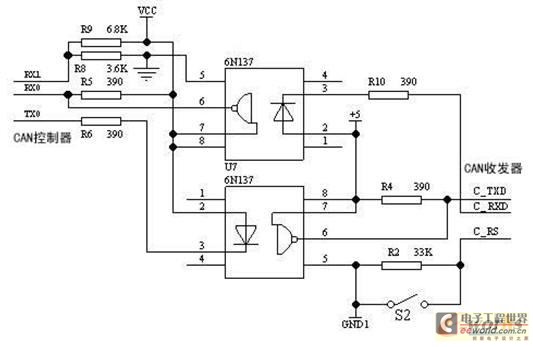
為了提高系統的抗干擾能力,在CAN控制器和CAN驅動器之間加入了使用高速光電隔離器件6N137構成的隔離電路,電路原理圖如圖:
程序模塊圖如下:

四、結束語
將CAN現場控制總線與成熟網絡結合,讓CAN通訊的工業測控設備、汽車電子設備、醫療電子設備等也能在有、無線中進行信息傳遞,勢必使工業信息化走上一個新的臺階。要想廣范圍的實施CAN網絡轉換技術,我們還必須面對標準制定,數據安全性,網絡穩定性等多方面的挑戰。

評論