基于CAN總線的模塊化獨立光伏發電控制系統

在對實時性、可靠性和擴展靈活性均有較高要求的光伏發電控制系統中,應用CAN總線構建其模塊化的系統結構,是比較適合的。
CAN協議是建立在國際標準化組織的開放系統互聯模型(Open system Interconnect,OSI)基礎上的,其模型結構只有三層,即底層的物理層、數據鏈路層和應用層。在CAN 2.0中,只規定了物理層和數據鏈路層,沒有定義應用層,需要用戶根據自己需求制定應用層協議。在光伏發電控制系統中,CAN總線上傳輸的數據可分為以下幾類:
(1)充電狀態信息。由充電模塊發送給管理模塊,包含充電模塊工作狀態,如充電方式、充電PWM頻率、太陽能陣列電壓、充電電流、故障信息等。此類信息數據量較大,廣播頻率1次/s。
(2)充電控制參數。由管理模塊廣播給所有充電模塊,包含了充電過程中一系列充電配置信息,如浮充電壓、均衡電壓、均衡時長等。當用戶通過管理模塊修改充電控制參數后,由管理模塊發送命令,修改充電模塊對應的參數。
(3)充電控制命令。由管理模塊下發給充電模塊,包括投Ⅳ切出充電命令、調整充電PWM占空比命令。在未達到充滿電壓時,管理模塊每隔10 s發送命令,讓一個充電模塊投入充電(充電占空比為100%);接近充滿電壓時,管理模塊每10 ms調整一個充電模塊的充電PwM占空比。該類命令數據量較小。
(4)緊急命令。當遇到危險情況(如蓄電池超壓、充電過流)需要緊急停機時,由管理模塊下發給充電模塊。此種命令不定時發送,數據量較小,需要的優先級較高。
系統中,在CAN 2.0B擴展幀格式的基礎上,根據光伏發電控制系統的需求特點,制定了一個多幀傳輸的應用層協議。協議中,將29位信息標志符進行分配如表1所示。
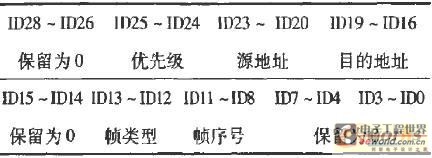
表1 CAN 2.0B標志符分配方案
協議將CAN 2.0B標準的29位標志符細分為優先級、源地址、目的地址、幀類型、幀序號5部分。當不同節點上有數據幀需要同時發送時,優先級小(標志符小)的數據幀將會被優先發送;當優先級相同時,源地址小的數據幀將會被優先發送。源地址和目的地址各占4位,定義0為全網廣播地址,最多可以有15個節點,可以滿足目前光伏發電控制系統的要求。幀類型定義了數據包中該數據幀的位置,可分為單幀、起始幀、中間幀和結束幀。幀序號定義了數據包中幀的序號,從0開始計算。協議中,將數據包的第一個字節作為命令字。
3 充電控制策略
對于獨立的光伏充電系統,蓄電池用于儲存光伏組件產生的電能。當負載工作時,蓄電池為負載提供電能。蓄電池性能的優劣和工作的穩定性直接影響到系統的運行情況,關系到整個系統的可靠程度。一旦蓄電池失效,將造成大的系統損失。如果能夠正確使用和維護蓄電池,就能夠延長其使用壽命。蓄電池壽命主要受以下兩個因素的影響:
(1)環境溫度。溫度過高,會使電池過充電,產生氣體;溫度過低,會使電池充電不足。因此,需要根據當前蓄電池溫度,對所設定的充電電壓進行溫度補償。
(2)充電控制方法。充電方式不當,容易使蓄電池析出氣體、容量減少、工作壽命縮短。過放和過充都會對蓄電池的壽命造成很大影響。在光伏充電控制系統中,管理模塊根據當前系統狀態,控制充電模塊進行充電。加入了溫度補償算法,可有效降低溫度對蓄電池壽命的影響。常用的充電方法有恒流充電、恒壓充電、三階段充電等。恒流充電在充電后期容易析出氣體,影響蓄電池的質量和壽命;恒壓充電在充電前期同樣會析出氣體;三階段充電方法,則避免了恒壓、恒流充電時析氣的缺點,且效率較高,故比較適合獨立光伏發電系統。但是,獨立光伏發電系統存在供電不足的問題,容易使蓄電池長時間處于欠充狀態。為進一步延長蓄電池使用壽命,采用了一種優化的三階段充電法。蓄電池三階段充電法充電曲線如圖4所示。
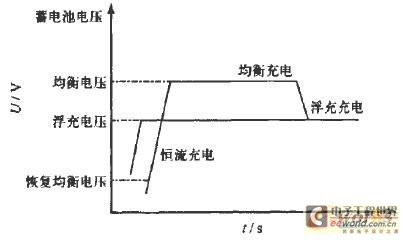
圖4 蓄電池三階段充電法曲線
由圖4可知,第一階段采用恒流充電,將電池容量充到90%;第二階段是浮充充電,將電池容量充到100%。停止充電;第三階段是補充的均衡充電。當檢測到蓄電池電壓低于設定的恢復均衡電壓閾值時,設定充電目標電壓為均衡電壓,達到設定的均衡時長后,轉入第二階段的浮充充電。
新型模塊化光伏充電控制系統的具體實施方案如下:為提高充電效率,當蓄電池電壓與充滿電壓差距較大時,管理模塊每隔10s發送命令,讓一個充電模塊投入充電(充電PWM占空比為100%);當蓄電池接近充滿電壓時,為了保證蓄電池電壓的平穩,防止過充或震蕩對蓄電池造成損害,管理模塊根據PI算法,定周期調整一個充電模塊充電PwM的占空比。其軟件程序流程如圖5所示。

評論