安森美汽車自適應前照燈系統(AFS)方案及其設計要點

另一種方法是機電一體化,典型產品如AMIS-30623。在這種方法中,步進電機驅動IC能夠直接安裝在步進電機結構內,僅需共享地線與LIN總線信號連接。這種方法極為有益,因為MCU與機電一體化模塊的接口連接只需要低電磁兼容性的總線。機電一體化方法采用模塊化設計,前照燈組件的維修保養方便,好處明顯。這兩種方法的結構示意圖如圖4所示。
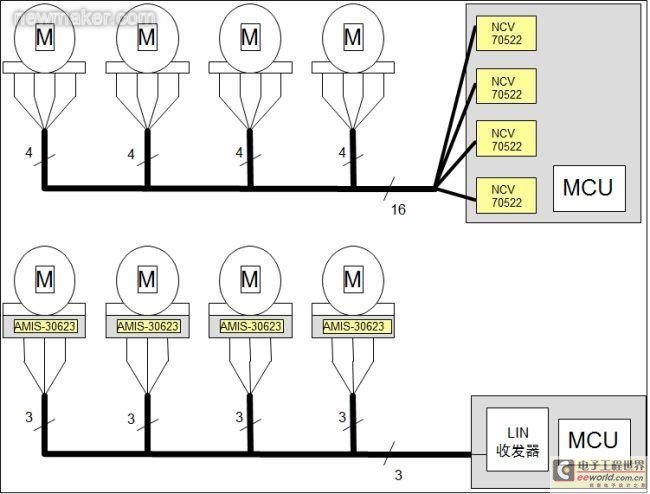
圖4:兩種不同的步進電機驅動器安放方法
安森美半導體主要AFS步進電機驅動器產品及關鍵特性
安森美半導體提供多種多樣的步進電機驅動器產品,如AMIS-30621、AMIS-30623、NCV70627、NCV70521及 NCV70522等。這些產品中, AMIS-30621、AMIS-30623及NCV70627采用LIN通信,而NCV70521及 NCV70522采用SPI通信。其中,AMIS-30623是一款單芯片微步進電機驅動器。它是通過LIN建立與主機遠程連接的專用機電一體化方案。該芯片通過總線接收定位指令,隨后驅動電機線圈到所需位置,可配置電流、速度、加速度和減速度等參數。該芯片自帶電機堵轉偵測。
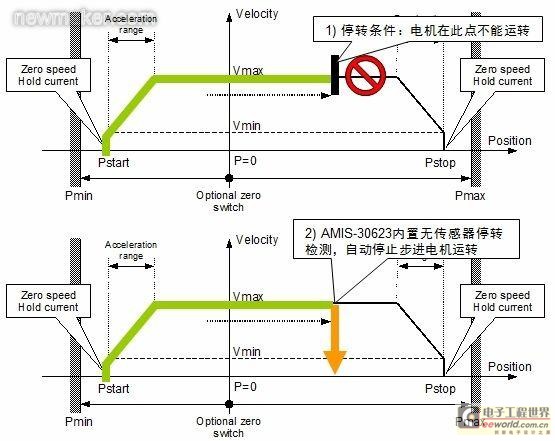
圖5:AMIS-30623的工作原理示意圖
NCV70522則是一款帶穩壓器及看門狗功能的SPI通信步進電機驅動IC。這單芯片微步進電機驅動器具有輸出電流選擇性、SPI接口、嵌入式5V穩壓器和看門狗復位等特性。該芯片接收通過一個輸入引腳脈沖信號啟動“下一步微步”命令,輸出線圈電流、微步數等參數。集成的SPI總線允許參數設定及診斷反饋。NCV70522的典型應用電路圖如圖6所示。
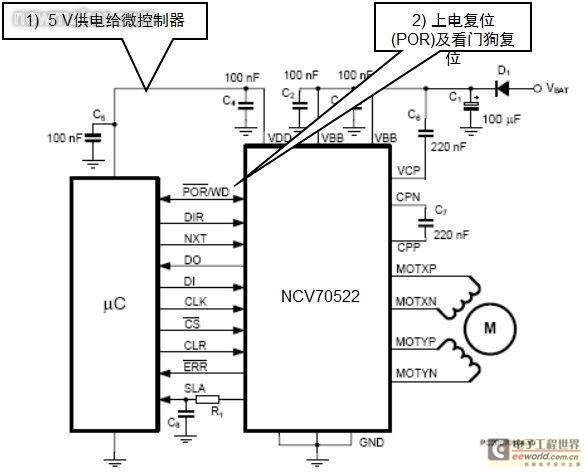
圖6:NCV70522典型應用電路圖
NCV70522應用設計要點
我們以NCV70522為例,介紹這芯片在AFS應用中的設計要點。NCV70522的控制要素包括步幅模式、NXT輸入及電機運轉方向(DIR)控制等。
1) SLA信號特性
NCV70522包含速度及負載角(SLA)輸出,配合創建停轉檢測算法及控制環路,以根據電機的反電動勢(BEMF)來調節轉矩和速度。

評論