汽車電動助力轉向試驗臺設計

3 EPS試驗臺硬件系統設計
EPS試驗臺主要由轉向力矩輸入、轉向阻力模擬系統及試驗臺測控系統組成,試驗臺能夠對不同類型的電動助力轉向系統進行測試。
3.1 轉向輸入力矩的實現
系統可以通過人工操縱轉向盤轉動進行測試,也可以在雙行星齒輪處增加帶減速機的驅動電機,通過編寫電機驅動程序控制電機帶動轉向盤轉動實現自動輸入轉矩。
3.2 轉向阻力矩模擬系統
在實際汽車轉向過程中,轉向盤會受到來自地方的轉向阻力,它受路面摩擦系數、前橋負荷、車速等因素的影響。轉向試驗臺通過在轉向搖臂端增加磁粉制動器向轉向機構提供模擬阻力矩。磁粉制動器選用CZK-5型自冷式空心軸超薄磁粉制動器,它的額定轉矩為50N·m,激勵電流為1A,允許滑差功率為1200W。轉向機構輸出轉矩為100N·m,故需要減速機構來增加阻力矩。如選用100N·m的磁粉制動器需要增加水冷冷卻裝置,故可采用齒輪式減速器來實現。
3.3 轉向試驗臺測控系統
轉向試驗臺測控系統的作用是在測試時,通過數據采集卡實時采集試驗臺上各種傳感器信號,如:轉向盤轉角、轉向盤扭矩、轉向阻力矩、助力電機電流等信號,顯示在工控機上,并保存到數據庫中共試驗分析用。圖2為EPS試驗臺的測控系統框圖。此外,制作控制柜,將工控機、數據采集卡、直流穩壓電源、磁粉制動器的驅動器以及信號發生器裝置集中安置,以方便對試驗進行控制操作。
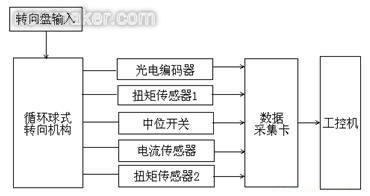
圖2 轉向試驗臺測控系統框圖
試驗臺軟件系統應具有數據采集、數據處理、數據顯示、電機控制、安全保護等功能。軟件系統可采用模塊化的設計方法,由界面通信模塊、綜合控制模塊、數據采集模塊、電機控制模塊、轉向回正模塊和信號給定模塊組成。試驗臺軟件系統的結構如圖3所示。各部分功能為:
軟件主控系統。整套試驗程序的主界面,管理各個試驗分項程序和功能模塊。
試驗準備。試驗參數的設置,試驗前對各個傳感器進行調零和 標定,檢測試驗臺的狀態以確保能夠進行試驗。
運動控制。對電機進行控制,使其按照標準中規定的形式運動和加載,同時將運動狀態進行反饋。
數據采集。采集各個模擬信號和開關信號。
數據分析處理。對從數據采集卡上采集的各路模擬信號進行分析和處理,主要是對干擾信號進行軟件濾波。
試驗顯示。把經過分析處理的數據在屏幕上實時地顯示出來,對要求繪制試驗曲線的試驗還會在屏幕上動態地繪制出試驗圖形。
數據庫。存儲和管理試驗數據和結果,也可以在試驗軟件中的數據庫操作界面中對歷史數據進行查詢。
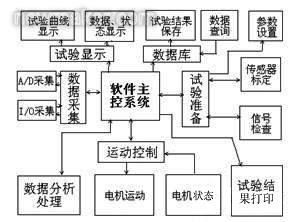
圖3 試驗臺軟件系統結構圖
設計開發了電動助力轉向試驗臺。試驗臺分硬件系統和軟件系統兩部分,采用模塊化設計。軟件系統將伺服控制和數據采集集合在工控機上,有效地提高了測控系統的效率和精度
電動助力轉向試驗臺可以使工程師在實車試驗前,通過臺架試驗獲得轉向機構的某些疾病參數和算法,減少EPS試驗投入,縮短開發周期。(end)

評論