基于CAN通訊模塊的閘間隙報警系統設計

0 引言
本文引用地址:http://www.104case.com/article/201612/331548.htm在煤礦生產中,礦井提升機是礦山大型關鍵設備。提升機的制動系統則是保證提升機能否安全運行、實現提升機正常減速停車以及在各種故障情況下執行緊急制動安全停車的最終手段。盤形閘是絞車提升系統中非常重要的配套設備,是保證安全提升的重要部分。盤形閘工作間隙報警有利于縮短故障排除的時間,故開發閘間隙報警模塊具有重要的實際意義。CAN總線是一種總線型現場設備控制網絡,具有突出的實時性、可靠性和靈活性。鑒于CAN總線的優勢,本文開發了一種基于AVR的閘間隙報警CAN通訊模塊,其成本低廉,安裝方便。
1 模塊硬件設計
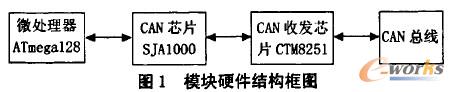
該模塊由處理器ATmega128、CAN總線控制器SJAl000以及CAN收發芯片CTM8251組成。其硬件結構如圖1所示。

1.1 微處理器
ATmega128是一種高性能、低功耗的AVR8位微處理器,擁有先進的RISC結構、128kB的系統內可編程Flash、4kB的EEPROM、8路10位ADC、2路8位PWM、2個可編程串行USART/獨立片內振蕩器的可編程看門狗定時器、53個可編程I/O口、2個具有獨立的預分頻器和比較器功能的8位定時器/計數器、2個具有預分頻器和捕捉功能的16位定時器/計數器;具有獨立預分頻器的實時時鐘計數器、片內/片外中斷源、全局上拉禁止功能。微處理器ATmegal28在此設計中起到了對CAN控制器控制的作用。微處理器頻率是16心z,每秒鐘的運算能力為16 MIPS,其豐富的片上資源使得ATmegal28非常適合于CAN通信的應用。
1.2 CAN總線接口電路
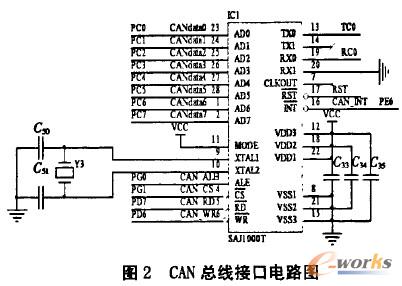
由于處理器ATmega128內部沒有集成CAN控制器,因此系統需要通過CAN控制器SJA1000芯片擴展出一個CAN接口。實現SJAi000擴展CAN總線接口的設計,就是對SJAl000的轉換邏輯結構之間的每個模塊進行設計。在設計中,將來自于ATmega128的I/O的數據(CANdata0~CANdata7)寫入SJAi000的內部寄存器,并通過ATmega128的I/O實現對SJAl000的控制。CAN總線接口電路如圖2所示。
1.3 CAN收發器
在CAN通信模塊設計中,為了增加CAN總線的抗干擾能力,可通過將SJAl000控制器TX0、RX0接口連接到CAN隔離收發器來實現。

評論