基于CAN總線的電子機械式制動系統電控單元的實現

4.3 關鍵技術的實現方法
4.3.1 踏板行程采集
踏板行程傳感器采用角位移傳感器,通過主節點的模數轉換接口模塊采集模擬信號。由于剎車系統是汽車中比較關鍵的部分,對剎車裝置的安全性要求較高,因此在踏板行程傳感器的設計采用冗余的設計方法。這里的一種實現方法是設計兩套傳感器,對應某一行程時兩套傳感器產生的模擬電壓值是二倍的關系,這樣采集并計算得來的踏板行程值有很高的安全性。
4.3.2 踏板行程變化率計算
采用定時器方式,每隔固定時間計將當前踏板行程值與前一次踏板行程值作差,求得踏板行程的變化率。但為了減小抖動并使變化率曲線平滑些,可以采用公式(1)計算方式。本文引用地址:http://www.104case.com/article/201612/331183.htm
其中dL是要計算的變化率,dL0是本次計算得出的變化率,dL1、dL2分別是前二次的變化率值。
4.3.3 制動力的計算
由于在電子制動系統中,計算制動力的算法要求有較大的靈活性,如根據車型不同能夠較方便更改算法參數。因此可以采用較靈活且對運算能力要求不是很高的模糊控制方法對踏板行程值和踏板行程變化率值來進行PWM輸出值的計算,進而控制制動力。
具體算法如下:
①模糊化。
輸入變量踏板行程L,論域為:{Z,PS,PM,PL}, 采用三角形隸屬度函數,如圖4所示。
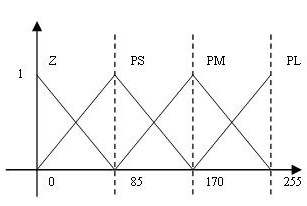
圖4 踏板行程隸屬度函數
輸入變量踏板行程變化率dL,論域為:{NL,NS,Z,PS,PL},采用三角形隸屬度函數,如圖5所示。
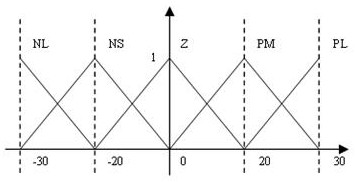
圖5 踏板行程變化率隸屬度函數
輸出變量定義為要求解的PWM值,論域為:{Z,PS,PM,PL}。
模糊化變量是根據隸屬度函數將輸入變量值轉換到論域中各元素的隸屬度值。
②模糊推理:
當對兩個輸入變量模糊化后,下一步是根據推理規則表進行模糊化推理。
表1 模糊推理規則表
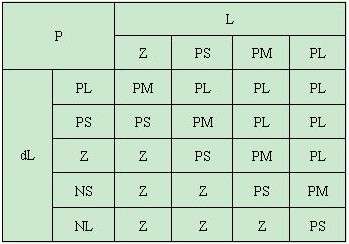
表中最左列是行程變化率dL對應的模糊化論域,最上行是行程L對應的模糊化論域。表中其它部分則是欲求解的PWM值對應的模糊化論域。
計算時,依次對表中間部分的每一個元素計算隸屬度值,方法是將對應的L和dL的隸屬度相乘。最后把相同的元素隸屬度值相加,可得到一組輸出變量的模糊化向量:(Z,PS,PM,PL)
③解模糊化:
根據下圖PWM值的隸屬度函數,采用來重心法來計算最終PWM輸出值。
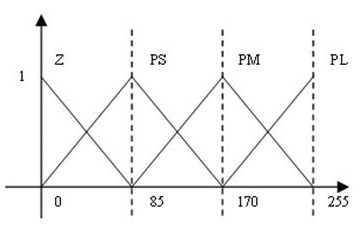
圖6 輸出PWM值隸屬度函數
重心法計算公式如公式(2)所示。
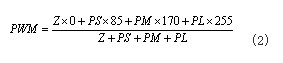
這樣求得的精確值即為最終PWM輸出值。
5、結論
本文采用目前流行的車載CAN總線網絡以較簡易的方式實現了EMB的基本功能,有著較高的實時性和時間響應性。采用網絡式控制方式,將驅動電機的具體實現設置到終端,并采用處理能力較弱且價格較低的微控制器;而在主控端采用處理能力挺強價格相對較高的微控制器,提高了整體設計的合理性。在安全性控制方面采用了模糊控制方法,而模糊控制方法最大的特點就是有很強的靈活性,可以根據需要進行控制方法的靈活修改,使得制動器的制動方式更加合理。
本系統在浙江亞太機電股份有限公司的“汽車線控制動系統電控單元研究與開發”項目中已經過臺架實驗的驗證其可行性。

評論