基于M0TM固態繼電器的汽車系統

汽車系統控制模塊包括各種精挑細選的固態繼電器,以便評測系統相對于指定負載、任務剖面和邊界條件的運行可靠性。
意法半導體的汽車固態繼電器是一個智能電源開關,主要是采用M0TM 技術研制,額定負載驅動能力為0.1安培至數十安培。過載和短路容錯功能采用限流和限制功率方法,以集成電路形式實現。這些功能的設計意圖是保證汽車系統的任務剖面,避免故障檢測發生錯誤,同時防止短路和過載沖擊驅動器和線束。在瞬變條件下(燈泡接通涌流、電機起動電流等…),防護功能可能會降低負載性能。因此,評測帶負載的驅動器功能是十分必要的。此外,要設定軟件的故障處理性能,需要對診斷行為進行全面分析。
最后,智能功率執行器,例如,智能保險,本身就具有電流-時間曲線特性,要想優化線徑,就必須測試這類器件。
功率芯片的參數,例如,工藝角參數、極限邊界條件和負載參數,以及最惡劣條件,都是設計時需考慮的因素。在臺架實驗中,需要很長時間才能等到最惡劣條件重現,獲得多個工藝角批次芯片。
TWISTER是意法半導體開發的一個仿真器,能夠為開發人員提供精確的M0-5/M0-5E、M06、M07高邊驅動器、Omnifets、H橋產品和最常用汽車負載的行為模型,對帶負載的驅動器進行完整的系統級仿真。為展示該開發工具的功能和特性,本文將簡要介紹智能驅動器的特性,并給出幾個車身驅動器的評估實測。
1. M0TM 智能固態繼電器
高邊驅動器 (HSD)、低邊驅動器(LSD)和智能開關是為惡劣的汽車工作環境設計的半導體器件,能夠承受所有的可能發生的故障狀況,例如,短路或過載現象。同時,行業法規要求必須測試當錯誤、短暫故障和/或電磁干擾導致繼電器關斷時是否為零風險。評測結果必須符合汽車產品標準。智能開關的保護策略可能影響負載性能,因此,產品選型不僅考慮開關在穩態時的行為,還要考慮其在保護電路激活時的瞬間行為表現。
1.1. 短路保護
兩級限流功能和一個功率限制功能確保開關在短路和過載條件下可靠工作,達到AEC-Q100-012汽車產品質量標準:
• 選擇限流參數高值(ILimH),以符合目標負載的涌流限制,同時,還應避免在涌流或短路期間電流密度過大,導致在功率MOSFET源極金屬層上引起電遷移。
• 限流低值(ILimL) 約是IlimH的30%,當短路持續存在時,激活限流低值機制,以終止電遷移效應。
• 功率限制功能用于限制短路或過載期間的最大平均功率,避免開關金屬層溫度瞬間驟變超過60K。快速熱瞬變可能在焊點和源極金屬層上引起熱機械應力。為確保汽車任務剖面,最大60K的 TJ熱變是意法半導體可靠性設計原則。
1.2. 負載兼容性
限流和功率限制功能可導致車燈開啟延遲,多數車企能夠接受在最惡劣情況下車燈開啟延遲最長10ms的方案,評測最惡劣情況需要使用工藝角批次參數。涉及的主要參數包括限流最小值(ILimH min)、在TFILAMENT=-40oC時的燈泡涌流最大值。
當驅動電機、阻性負載和感性負載時,需要給予類似的考慮。這些負載的涌流很大,可能使用短驅動脈沖,所以需要檢測驅動器的尺寸,主要是在瞬變條件下。
1.3. 電流-時間曲線
短路和過載的反應時間與短路電阻是函數關系。為什么保護策略要采用限流和限溫兩種策略呢?因為反應時間不僅受到芯片參數離散的影響,還受到溫度邊界條件的影響(見圖1)。
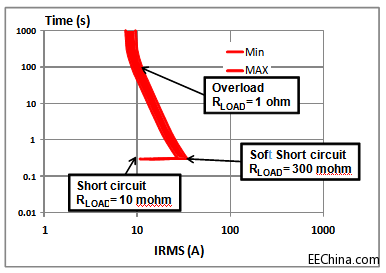
圖1: 電流-時間曲線與短路電阻是函數關系,紅色區域代表因芯片參數離散和溫度邊界條件而引起的所有的可能的變化。
2. TWISTER概述
圖2所示是Twister圖形用戶界面的主窗口。直接點擊相應的圖標即可選擇并設置電源電壓、線束、汽車負載和控制輸入。每個輸入輸出值都可選擇,并繪制成可縮放的圖形。數據導出功能支持多種文件格式。下面是該仿真環境的主要功能:
• 選擇功率芯片和相關參數(見圖4)
• 設置PCB散熱系統溫度(見圖4)
• 設置電池電壓
• 設置電池極性接反電壓
• 設置輸入電壓
• 設置環境溫度
• 選擇負載 (R, RC, RL/電流/功率分布圖、直流電機、12V & 24車燈)
• 設置仿真時間
• 繪制與電和溫度相關的所有輸入輸出變量曲線圖
• 評測相對于負載阻抗的電流-時間曲線
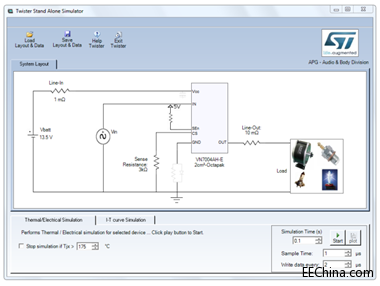
圖2: Twister主窗口: 點擊芯片圖片,即可打開芯片、負載、輸入、Vbat電壓選擇菜單
3. 負載兼容性評測示例
本示例測試一個驅動10W轉向燈的140m? 高邊驅動器VNx7140Ax,在所有最惡劣情況下,測評必須滿足下列條件:
結溫 < 熱關斷閾值
1) 導通< 10ms時的功率限制時長
圖3所示是評測電路連接配置圖,而圖4是芯片選型窗口,用戶可在這里設置最惡劣條件下的芯片參數和邊界條件。
當環境溫度是規定的最高溫度時,如果熱關斷閾值和ILimH 限流參數高值均最低的工藝角批次芯片導通,就會發生結溫達到熱關斷值的重大風險(見圖5) .

評論