磁浮列車同步485通信方式的研究

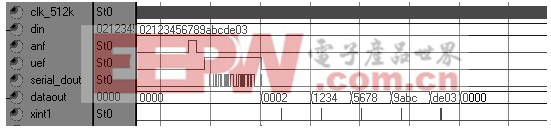
圖6 車載無線電傳輸單元DSP控制器從FPGA收發器讀數據的仿真波形
2通信雙方的原理圖
根據以上對同步485實現方法的描述,在ISE中利用ECS工具所描繪的頂層原理圖如下,包括測速定位單元同步數據發送和車載無線電控制單元同步數據接收。
定位測速單元同步數據發送方的原理圖如圖7所示。
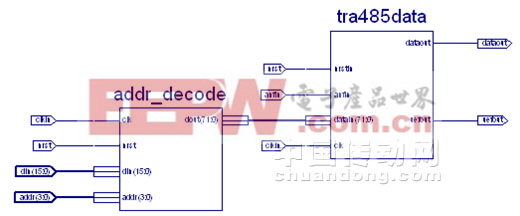
圖7 同步數據發送方原理圖
圖7中,addr_decode為地址譯碼模塊,用于從DSP完整地接收一幀定位信息;tra485data為串行數據及門控信號發送模塊。其中,din(15:0)直接來自DSP的16bits數據線;addr(3:0)與DSP的A17-A14地址線相連;clkin及anfin信號由車載無線電控制單元提供。輸出的dataout及uefout經過輸出緩沖及差分電平轉換后送給車載無線電控制單元。
車載無線電控制單元同步數據接收方的原理圖如圖8所示。
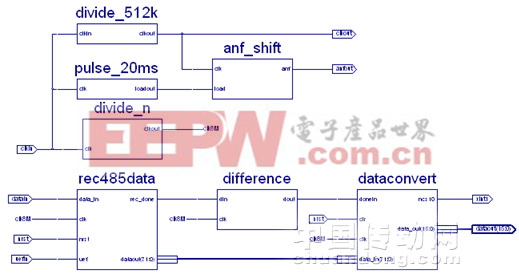
圖8 同步數據接收方原理圖
圖8中,divide_512k為發送時鐘產生模塊,產生通信所需的波特率時鐘;anf_shift 用于產生無線電請求信號;rec485data用于串行接收定位信息并通過dataconvert模塊轉發到通信控制器。其中,Dataout(15:0)直接通過數據線連到DSP,Xint1則連到DSP的外部中斷1。anfout和clkout由輸入的晶振頻率分頻后得到,經輸出緩沖及差分電平轉換后送給車輛測速定位單元。
3 結束語
在高速磁浮列車特殊的通信環境中,基于RS-485物理層的同步通信方式體現出其抗干擾性強、實時性好,誤碼率低等優點,且實現原理簡單,硬件連接也不復雜。利用FPGA所實現的通信收發器設計靈活、可靠性高,其功能在實際應用中已得到驗證,且效果良好。

評論