一:當今的自動化應用中,智能型技術發展方興未艾,例如分布式運動控制,其中所有信息與控制均由中央服務器推送至自動化系統的邊緣裝置,這種設計大量節約了時間與金錢,儼然形成一種趨勢。之前分布式控制并不普及人們使用傳統的集中式運動控制,由主機(如PLC)管理馬達的運動,但是這種控制方式的缺點是需要大量的步線,建置如此復雜的系統相當困難,常出現線纜束過粗不易維修或無法提供可靠服務的情況。 本文引用地址:http://www.104case.com/article/201612/330617.htm |
相較之下,分布式運動控制系統可減少甚至解決這些問題。由于控制功能就位在驅動器內部或周圍,從中心點至各運動軸的布線需求大幅減少,除使布線作業更輕松外,并可有效降低安裝成本。而分布式系統可有效串聯短程控制以達到較遠距離,使整體控制范圍擴大,則是另一項額外的效益。 |

二:TRIANMIC是德國一家從事運動控制的研發型公司,致力于步進電機,直流電機,壓電陶瓷電機的驅動器,控制器,通訊工具,運動控制芯片的開發,此外還為客戶提供專業定做方案。其幾乎所有產品都是基于分布式控制理念。現在就介紹基于TRINAMIC產品的嵌入式運動控制方案。整個方案系統圖 |
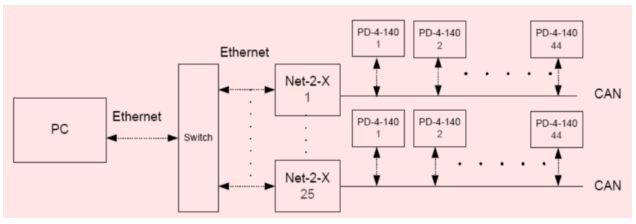
上圖為控制1100個步進電機的例子,下圖為結構簡圖。 |

整個網路結構十分清晰,主要有Ethernet轉CAN的NET-2-X和PD-140-42-SE-CAN(支持CAN總線的控制+驅動+電機+反饋)現分別介紹PD-140-42和NET-2-X。 |
三:PD-140-42-SE-CAN:集成控制+驅動+電機+反饋 |



評論