基于CPLD/FPGA/MCU的CAN-VME總線轉換方案

2 轉換系統的軟件設計
2.1 軟件設計思路
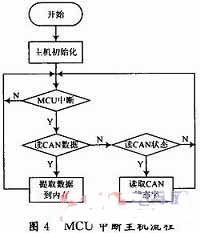
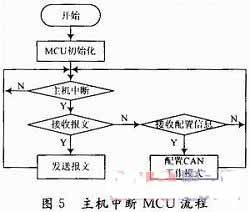
由FPGA構建8個雙口RAM,8路CAN控制器通過這8個雙口RAM與上位VME總線主機進行數據通信,RAM口分別映射到VME總線主機內存地址和MCU存儲器空間中。系統數據傳輸采用MCU中斷主機(VME主機)和主機中斷MCU兩種方式,前者通過觸發主機外部中斷實現,由雙口RAM里面的中斷控制來決定的,在觸發中斷后,提示主機讀取CAN控制器接收到的數據以及CAN控制器的工作狀態。主機中斷MCU方式是通過MCU的外部中斷管腳實現的,是由主機寫入雙口RAM的控制字實現的。觸發該中斷后,MCU就從主機接收要發送的報文,并發送到相應的CAN節點上,并配合主機配置CAN控制器的控制模式。中斷流程如圖4,圖5所示。
2.2 FPGA的軟件設計
在該系統中,數據都由VME主機控制,所以FPGA構造雙口RAM(或者8個區域即可),使VME主機和MCU在RAM中完成數據傳輸。即主機要發送的數據放入RAM中等待MCU提取,同時MCU發送的數據放入RAM中等待VME主機提取。
2.3 CAN節點軟件設計
CAN節點軟件是本系統的重點,它包括CAN控制器初始化、報文發送和報文接收3個部分。
初始化主要完成設置工作方式、接收方式、屏蔽寄存器、驗收代碼寄存器、波特率和中斷寄存器,并且要在復位模式下進行初始化。初始化流程如圖6所示。
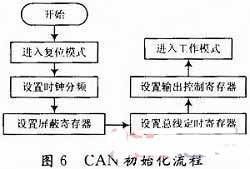
報文發送就是將代發的數據按照CAN總線協議的數據格式,組成一幀一幀的報文,送入SJA1000的發送緩沖區,觸發SJA1000發送即可;報文接收同理。
2.4 MCU轉換程序設計
微控制器程序設計的主要目的是以最快的速度響應中斷請求,完成兩種總線數據的轉換和傳輸。編程時采用模塊化思想,每個模塊完成一定的功能。編程采用Keil公司的Keil μVision3編程工具,設計分為:初始化系統、使能中斷、查詢總線,隨時準備響應MCU中斷主機(VME主機)和主機中斷MCU兩種中斷觸發,并且完成VME總線和CAN總線之間的重組和交換,及時將轉換后的信息相應地傳送給VME主機或者發送到CAN節點上。流程如圖7所示。
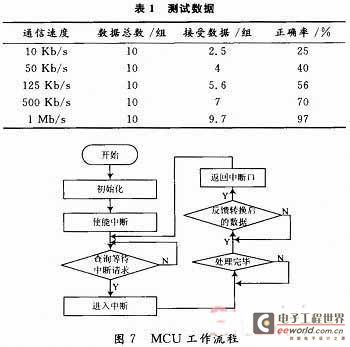
3 測試分析
測試過程由VME總線端和CAN總線端互相發送數據包。其中,測試了5組由VME總線發送到CAN總線的數據包;5組由CAN總線發送到VME總線的數據包,記錄如表1所示。由表1測試結果所示,該系統中CAN總線節點都設置在1 Mb/s的速率下,系統可以準確地接受和發送數據包。系統正確率之所以會隨通信速度的提高而提高,主要原因在于系統在不同的通信速度時,數據包發送頻率、發送的最小延時間隔都不相同。如果需要進一步的提升數據發送的正確率,需要系統在硬件設計和PCB板制作上分別努力,才能保證盡可能小的干擾,盡可能大的提高系統的穩定性和抗干擾性。本文引用地址:http://www.104case.com/article/201612/330610.htm
4 結語
該系統充分利用了VME總線和CAN總線的優點,在FPGA和MCU的基礎上實現相應的電路的連接和軟件的設計,成功地完成兩種不同總線之間的轉換,擴展了兩種總線的應用范圍。

評論