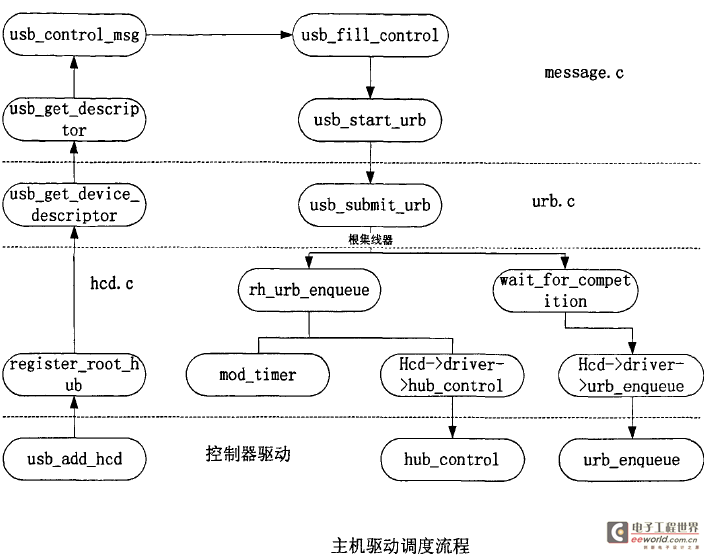
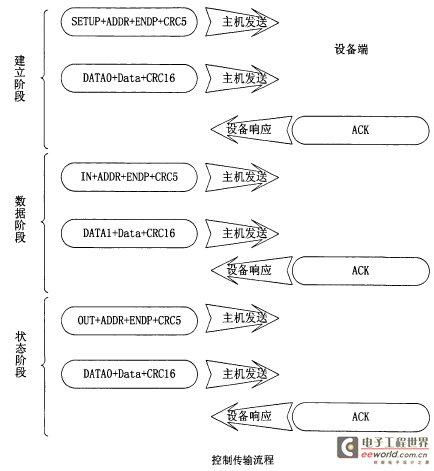
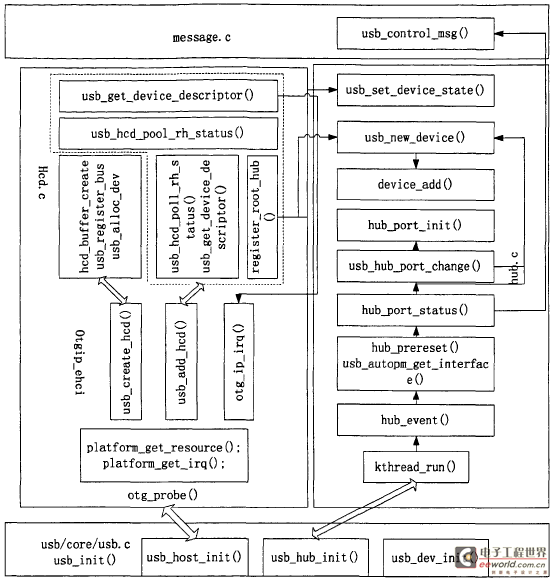
USB數據傳輸都以URB(USB Request Block)請求、URB生成、URB遞交、URB釋放為主線。從上圖可知,當加載控制器驅動之后,注冊根據集線器,hub和hcd驅動成為一個整體。接著,主機通過控制傳輸獲取設備的控制描述符等信息,接著詳述整個控制傳輸的流程。usb_submit_urb依據是否連接到根集線器來決定調用urb_enqueue或rh_urb_enqueue函數。
USB從設備通過集線器或根集線器連接到USB主機上。比如:主機通過根集線器與外界進行數據交互,根集線器通過探測數據線狀態的變化來通知USB主機是否有USB外圍設備接入。
在主機端控制器驅動加載的過程中,注冊了根集線器,然后匹配了相應的hub驅動程序,同時完成了對Hub的輪詢函數和狀態處理函數的設置。這樣,一旦hub集線器的狀態發生變化,就會產生相應的中斷,主機端控制器就會執行相應的中斷處理函數,下圖為hub驅動程序的流程圖。
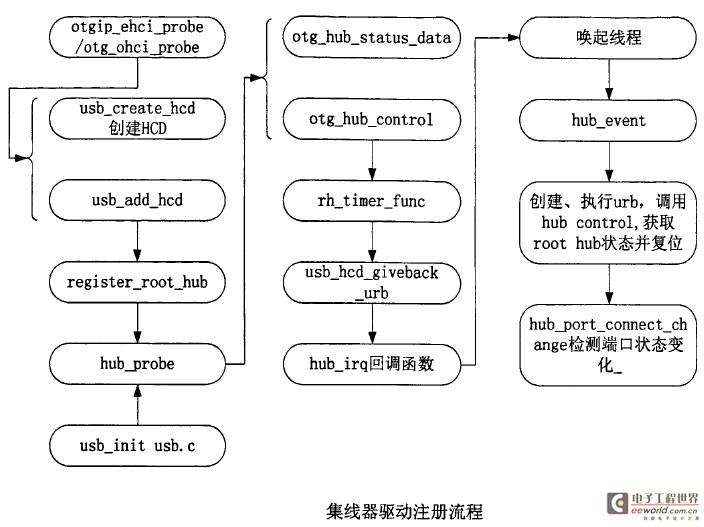
USB Core中的usb_init()函數中完成了對hub線程(khubd,在usb_hub_init函數中真正地創建)的創建,然后完成相應設備的探測。主機端控制器驅動進行探測時,將hub驅動和主機端控制器驅動結合在一起,相互之間完成調用。 相對于大容量存儲設備與主機之間通過控制/批量傳輸,集線器與主機之間通過中斷/控制方式完成數據交互。
3.2 USB設備端驅動
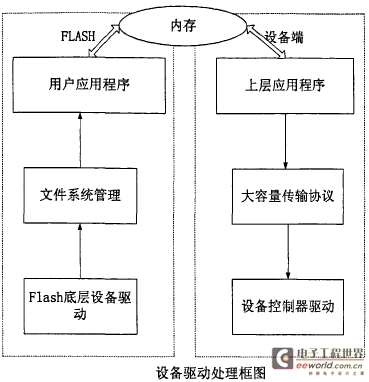
從上圖可知,設備端驅動包含兩部分:
1) 底層設備控制器驅動
2) 上層大容量存儲類驅動
3.2.1 設備控制器驅動
USB設備控制器驅動主要實現Gadget API定義的函數和中斷服務函數,可按功能劃分為:API函數實現模塊和中斷處理模塊。
API函數主要實現Gadget API定義的函數功能,如結構體usb_ep_ops和usb_gadget_ops中的函數、usb_gadget_register_driver函數。這些函數是供Gadget Driver調用。
中斷處理模塊主要處理設備控制器產生的各種中斷,包括端點中斷、復位、掛起等中斷。
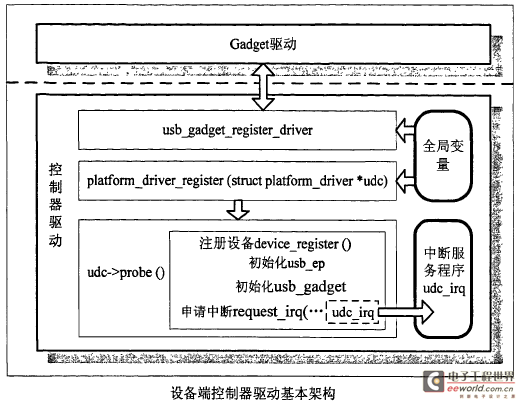
上圖為設備端控制器基本架構,主要完成了Gadget驅動和控制器驅動綁定、usb_gadget_register_driver注冊。
3.3 OTG驅動
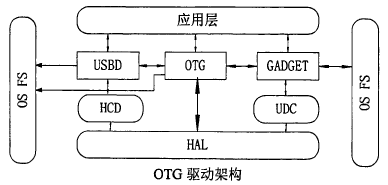
OS_FS: 文件系統
USBD: USB核心
HCD: 主機控制器驅動
UDC: 設備端控制器驅動
OTG設備支持HNP和SRP協議。OTG設備通過USB OTG電纜連接到一起,其中接Mini-A接口的設備為A設備,默認為主機端,Mini-B接口的設備默認為B設備。當A、B設備完成數據交互之后,A、B設備之間的USB OTG電纜進入掛起狀態,如下圖所示:
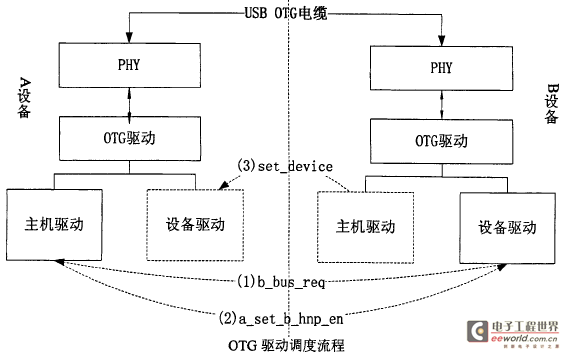
當B設備寫入b_bus_req,向A設備發起HNP請求。待A設備響應之后,A設備發送a_set_b_hnp_en,B設備響應之后即進入主機狀態,同時發送請求使用A設備set_device,這樣A、B設備完成主從交換。
4. USB 傳輸流程
4.1 USB初始化過程
USB驅動作為一個系統,集成了眾多的驅動模塊,注冊過程非常復雜。從USB系統的角度來說,USB主機驅動主要包含:
1) USB核驅動
2) 主機控制器驅動
3) 集線器驅動
驅動的加載執行流程如下圖所示:
USB初始化過程
4.1.1 USB Core的初始化
USB驅動從USB子系統的初始化開始,USB子系統的初始化在文件driver/usb/core/usb.c
- subsys_initcall(usb_init);
- module_exit(usb_exit);
subsys_initcall()是一個宏,可以理解為module_init()。由于此部分代碼非常重要,開發者把它看作一個子系統,而不僅僅是一個模塊。USB Core這個模塊代表的不是某一個設備,而是所有USB設備賴以生存的模塊。在Linux中,像這樣一個類別的設備驅動被歸結為一個子系統。subsys_initcall(usb_init)告訴我們,usb_init才是真正的初始化函數,而usb_exit將是整個USB子系統結束時的清理函數。
4.1.2 主機控制器的初始化及驅動執行(以EHCI為例)
module_init(otg_init); 模塊注冊
static init __init otg_init(void);
platform_driver_register(); 平臺注冊
static int __init otg_probe(struct platform_device *pdev); 探測處理函數
reg = platform_get_resource(pdev, IORESOURCE_MEM, 0); 獲取寄存器信息
data = platform_get_resource(pdev,IORESOURCE_MEM, 1); 獲取內存信息
irq = platform_get_irq(pdev,0); 獲取中斷號
usb_create_hcd(&otg_hc_driver, &pdev->dev, pdev->dev.bus_id);
分配和初始化HCD結構體。對設備數據空間進行分配,初始化計數器、總線、定時器、hcd結構體各成員值。
ret = usb_add_hcd(hcd,irq,SA_INTERRUPT);
完成HCD結構體的初始化和注冊。申請buffer,注冊總線、分配設備端內存空間,向中斷向量表中申請中斷,注冊根集線器,對根集線器狀態進行輪詢。
4.1.3 注冊集線器
register_root_hub(hcd);
在USB系統驅動加載的過程中,創建了集線器的線程(khubd),并且一直查詢相應的線程事務。HCD驅動中,將集線器作為一個設備添加到主機控制器驅動中,然后進行集線器端口的初始化。在USB主機看來,根集線器本身也是USB主機的設備。USB主機驅動加載完成之后,即開始注冊根集線器,并且作為一個設備加載到主機驅動之中。
USB主機和USB設備之間進行數據交互,USB設備本身并沒有總線控制權,U盤被動地接收USB主機發送過來的信息并做出響應。USB主機控制器與根集線器構成了主機系統,然后外接其它的USB設備。
為了更好地探測到根集線器的狀態變化,USB主機控制器驅動增加了狀態輪詢函數,以一定的時間間隔輪詢根集線器狀態是否發生變化。一旦根集線器狀態發生變化,主機控制器就會產生相應的響應。
USB主機和USB設備之間的數據傳輸以URB(USB Request Block)的形式進行。
4.2 URB傳輸過程
USB初始化過程中,無論是主機控制器驅動還是根集線器驅動,都是通過URB傳輸獲取設備信息。
4.2.1申請URB
struct urb *usb_alloc_urb(int iso_packets, gfp_t mem_flags)
為urb分配內存并執行初始化。
4.2.2 初始化URB
初始化具體的urb包
- staticinlinevoidusb_fill_bulk_urb(structurb*urb,
- structusb_device*dev,
- unsignedintpipe,
- void*transfer_buffer,
- intbuffer_length,
- usb_complete_tcomplete_fn,
- void*context)
- staticinlinevoidusb_fill_control_urb(structurb*urb,
- structusb_device*dev,
- unsignedintpipe,
- unsignedchar*setup_packet,
- void*transfer_buffer,
- intbuffer_length,
- usb_complete_tcomplete_fn,
- void*context)
- staticinlinevoidusb_fill_int_urb(structurb*urb,
- structusb_device*dev,
- unsignedintpipe,
- void*transfer_buffer,
- intbuffer_length,
- usb_complete_tcomplete_fn,
- void*context,
- intinterval)
不同的傳輸模式下,驅動為之申請不同的URB。其中,Linux內核只支持同步傳輸外的三種傳輸事件,ISO事務需要手工進行初始化工作。控制傳輸事務、批量傳輸事務、中斷傳輸事務API如上所示。
三種事務傳輸模式下的URB初始化函數有很多相似之處,主要參數含義如下:
• urb: 事務傳輸中的urb
• dev: 事務傳輸的目的設備
• pipe: USB主機與USB設備之間數據傳輸的通道
• transfer_buffer: 發送數據所申請的內存緩沖區首地址
• length: 發送數據緩沖區的長度
• context: complete函數的上下文
• complete_fn: 調用完成函數
• usb_fill_control_urb()的setup_packet: 即將被發送的設備數據包
• usb_fill_int_urb()的interval: 中斷傳輸中兩個URB調度的時間間隔
4.2.3 提交URB
URB初始化完成之后,USBD開始通過usb_start_wait_urb()提交urb請求(它調用usb_submit_urb來真正的發送URB請求),添加completition函數。
接下來,從message.c傳到主機控制器(hcd.c),開始真正的usb_hcd_submit_urb()。此時,根據是否為根集線器,進入不同的工作隊列。
usb_start_wait_urb->
usb_submit_urb->
usb_hcd_submit_urb
a) root_hub傳輸
若為root hub,將調用rh_urb_enqueue(),共有兩種傳輸事務(控制傳輸和中斷傳輸)
- staticintrh_urb_enqueue(structusb_hcd*hcd,structurb*urb)
- {
- if(usb_endpoint_xfer_int(&urb->ep->desc))//中斷傳輸
- returnrh_queue_status(hcd,urb);
- if(usb_endpoint_xfer_control(&urb->ep->desc))//控制傳輸
- returnrh_call_control(hcd,urb);
- return-EINVAL;
- }
b) 非root_hub傳輸
對于非常root_hub傳輸,它調用:
status = hcd->driver->urb_enqueue(hcd, urb, mem_flags);
c) 批量傳輸
root_hub本身沒有批量傳輸流程,按照控制傳輸流程,控制傳輸最終要通過switch語句跳轉到Bulk-Only傳輸流程中。


評論