無刷直流電機(jī)控制器硬件設(shè)計(jì)和實(shí)現(xiàn)

0 引言
本文引用地址:http://www.104case.com/article/201612/330187.htm無刷直流電機(jī)(以下簡(jiǎn)稱BLDCM)用電子換相器取代機(jī)械換向器,根除了電刷和換向器接觸磨損所導(dǎo)致的壽命周期短、電氣絕緣低、火花干擾強(qiáng)等諸多缺陷;同時(shí)永磁材料的高磁性能使無刷直流電機(jī)具有起動(dòng)轉(zhuǎn)矩大、調(diào)速范圍廣、運(yùn)行效率高等優(yōu)點(diǎn),在各個(gè)工業(yè)領(lǐng)域有著廣泛應(yīng)用。
由于本系統(tǒng)有較高的可靠性要求,因此總體設(shè)計(jì)思路是采用主控、監(jiān)控雙DSP系統(tǒng)架構(gòu)滿足控制器的高可靠性要求;三相功率逆變器選用三菱公司的第五代智能功率模塊PM15 0CLA120為核心,采用光耦HCPL4506進(jìn)行門極驅(qū)動(dòng)信號(hào)隔離;采用多傳感器進(jìn)行系統(tǒng)狀態(tài)監(jiān)測(cè)并通過轉(zhuǎn)速和電流雙閉環(huán)控制策略進(jìn)行電機(jī)轉(zhuǎn)速精確控制,從而滿足系統(tǒng)對(duì)無刷電機(jī)控制器的高可靠性運(yùn)行和精確的轉(zhuǎn)速控制以及寬范圍轉(zhuǎn)速調(diào)節(jié)等控制要求。
1 系統(tǒng)組成
BLDCM控制系統(tǒng)原理框圖如圖1所示,控制器通過RS422與上位機(jī)進(jìn)行通信;無刷電機(jī)通過機(jī)械傳動(dòng)裝置驅(qū)動(dòng)系統(tǒng)運(yùn)轉(zhuǎn);采用旋轉(zhuǎn)變壓器傳感器作為BLDCM的轉(zhuǎn)子位置和轉(zhuǎn)速反饋元件。
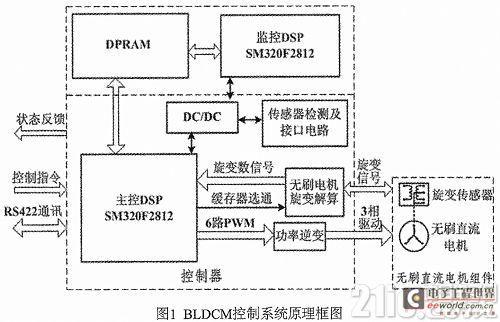
控制器采用高性能的數(shù)字信號(hào)處理器作為控制核心,其中主控DSP完成無刷直流電機(jī)的轉(zhuǎn)速和電流雙閉環(huán)控制,滿足無刷電機(jī)具有調(diào)速范圍寬、控制精度高的要求;監(jiān)控DSP完成系統(tǒng)溫度、電流、電壓、轉(zhuǎn)速等狀態(tài)監(jiān)控,通過傳感器檢測(cè)冗余(數(shù)量冗余、類型冗余、位置冗余)設(shè)置,既可以實(shí)現(xiàn)關(guān)鍵參數(shù)的精確測(cè)量和控制策略的精細(xì)化操作,還可以確定功率開關(guān)及電機(jī)三相繞組故障狀態(tài)。監(jiān)控DSP和主控DSP通過雙口RAM(DPRAM)快速進(jìn)行數(shù)據(jù)交換,便于控制系統(tǒng)工作。
2 各模塊設(shè)計(jì)
2.1 雙DSP設(shè)計(jì)
控制器選用的TMS320F2812是美國(guó)TJ公司推出的32位定點(diǎn)數(shù)字信號(hào)處理器,專門針對(duì)電機(jī)和運(yùn)動(dòng)控制。主控DSP具備6路PWM 輸出模塊、功率驅(qū)動(dòng)及逆變模塊、旋變位置傳感器激勵(lì)及解算模塊、模擬量轉(zhuǎn)換模塊、SCI通信等主要模塊,具有很強(qiáng)的實(shí)時(shí)數(shù)據(jù)運(yùn)算能力;監(jiān)控DSP進(jìn)行模擬信號(hào)采集、外部通訊、系統(tǒng)運(yùn)行工況監(jiān)控等非實(shí)時(shí)信息處理。
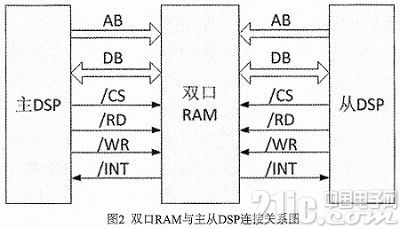
由于DSP嵌入式系統(tǒng)的特點(diǎn)在于高速數(shù)據(jù)處理,因此實(shí)現(xiàn)主DSP與從DSP之間的數(shù)據(jù)通信成為主從式硬件系統(tǒng)的一個(gè)設(shè)計(jì)關(guān)鍵。本系統(tǒng)利用DPRAM作為共享存儲(chǔ)器進(jìn)行通信,其優(yōu)點(diǎn)是實(shí)時(shí)性好,可靠性高,數(shù)據(jù)傳輸效率高,接口電路簡(jiǎn)單。DPRAM的每個(gè)端口都有各自的數(shù)據(jù)、地址、控制總線,允許處理器對(duì)存儲(chǔ)器的任何地址執(zhí)行隨機(jī)讀寫操作。DPRAM與兩個(gè)DSP之間的硬件連接關(guān)系如圖2所示。
2.2 功率逆變電路及驅(qū)動(dòng)設(shè)計(jì)
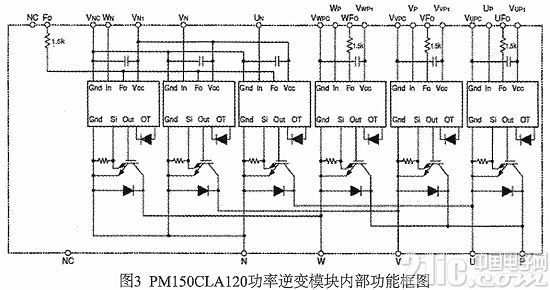
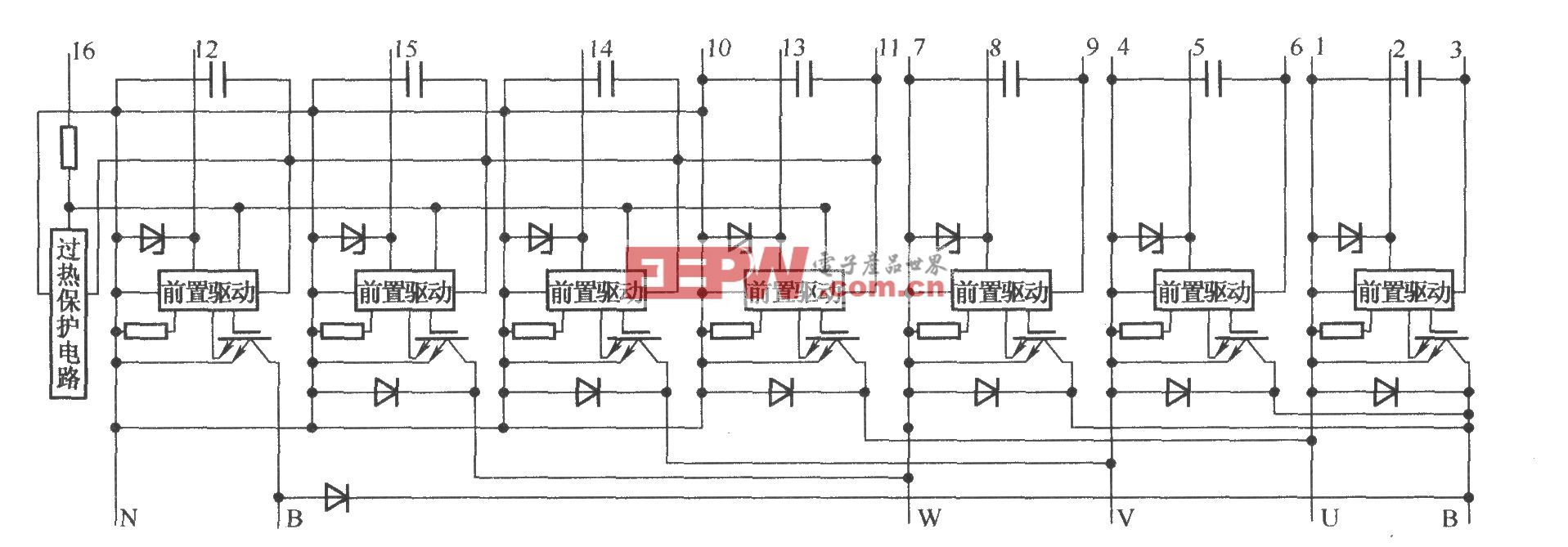
根據(jù)控制器負(fù)載需求及功率開關(guān)器件的應(yīng)用場(chǎng)合,設(shè)計(jì)選用三菱公司第五代智能功率模塊PM150CLA120(以下簡(jiǎn)稱IPM)為功率逆變電路,其主要設(shè)計(jì)參數(shù)為耐壓1200V、最大負(fù)載電流150A;該IPM模塊內(nèi)部集成了6個(gè)IGBT開關(guān)管逆變電路、優(yōu)化門極驅(qū)動(dòng)電路以及快速保護(hù)電路,其內(nèi)部框圖如圖3所示并其具有以下突出優(yōu)點(diǎn):1)開關(guān)管導(dǎo)通壓降低、開關(guān)損耗低;2)集成過流、過熱、欠壓等保護(hù)功能;3)內(nèi)置自舉電路實(shí)現(xiàn)單電源供電;4)采用優(yōu)化設(shè)計(jì)抑制浪涌、噪聲等引起的干擾問題。
主控DSP輸出6路PWM信號(hào)用于驅(qū)動(dòng)功率逆變電路過程中,為防止控制信號(hào)受功率驅(qū)動(dòng)電路的干擾,采用“光耦+隔離電源”的方式用于逆變橋功率開關(guān)的門極驅(qū)動(dòng)。設(shè)計(jì)使用光耦HCPL4506作為隔離驅(qū)動(dòng)電路的核心芯片,其最大驅(qū)動(dòng)電流2.5A,可滿足功率模塊PM150CLA120的驅(qū)動(dòng)電流要求;原副邊之間瞬態(tài)隔離電壓10kV/μs,可以確保各功率開關(guān)之間的隔離強(qiáng)度;使用隔離電源DC/DC模塊PWF2415D作為IGBT功率開關(guān)門極驅(qū)動(dòng)電源,隔離強(qiáng)度為1500VAC,同時(shí)具有輸出短路保護(hù)(自恢復(fù))功能。
2.3 電流采樣設(shè)計(jì)
控制系統(tǒng)設(shè)計(jì)選用隔離型電流傳感器GCBC100進(jìn)行電流采樣,其靈敏度為40mV/A,非線性度為±1%,符合控制系統(tǒng)的精度要求。采樣電路將電流傳感器輸出電壓信號(hào),經(jīng)過運(yùn)算放大器及濾波電路,轉(zhuǎn)換為DSP的AD通道能夠接收的電壓范圍(0~3.3V),使控制器能夠?qū)崟r(shí)監(jiān)控電流的變化,進(jìn)行電流環(huán) PID調(diào)節(jié)。
2.4 旋變解算
旋變解算芯片采用AD公司的AD2S82A芯片,其可以將旋轉(zhuǎn)變壓器輸出的模擬位置信號(hào)轉(zhuǎn)換成數(shù)字位置信號(hào),而且同時(shí)還可以得到高精度的速度信號(hào),能夠很好地滿足位置及速度反饋信號(hào)的要求。并設(shè)置為12位解算精度,對(duì)應(yīng)跟蹤轉(zhuǎn)換速度最高可達(dá)15600r/min,滿足設(shè)計(jì)要求;使用由運(yùn)算放大器、電阻和電容構(gòu)成的文氏橋正弦波激勵(lì)發(fā)生電路產(chǎn)生旋變激勵(lì)信號(hào),結(jié)構(gòu)簡(jiǎn)單,可靠性高。
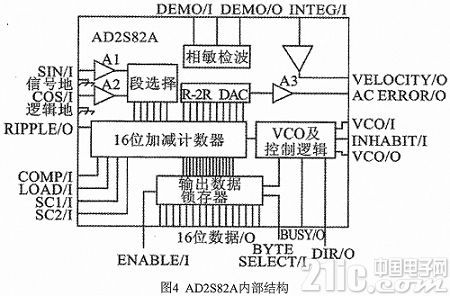
AD2S82A內(nèi)部結(jié)構(gòu)如圖4所示。旋轉(zhuǎn)變壓器輸出的正、余弦信號(hào)經(jīng)濾波、放大后輸入至AD2S82A的sin和cos引腳,在合適的外圍配置電路配合下,AD2S82A即可完成12位數(shù)字量輸出。AD2S82外圍配置電路由電阻和電容構(gòu)成,以實(shí)現(xiàn)引腳電平上拉、下拉、高頻濾波、增益設(shè)定、最大跟蹤速率設(shè)定和閉環(huán)帶寬等設(shè)定功能,設(shè)計(jì)嚴(yán)格參考相應(yīng)的數(shù)據(jù)手冊(cè)及相關(guān)軟件進(jìn)行選取,保證AD2S82能夠可靠工作。
3 試驗(yàn)驗(yàn)證
3.1 旋變解算試驗(yàn)
圖5為無刷電機(jī)勻速旋轉(zhuǎn)時(shí)旋轉(zhuǎn)變壓器(RVDT)的激勵(lì)信號(hào)、正弦輸出信號(hào)和余弦輸出信號(hào)的測(cè)試波形,從圖中可以看出兩路輸出信號(hào)正交,輸出信號(hào)與激勵(lì)信號(hào)過零點(diǎn)重合,未出現(xiàn)相位偏移現(xiàn)象。輸出信號(hào)經(jīng)旋變結(jié)算芯片AD2S82A解算輸出12位數(shù)字量(0~8191對(duì)應(yīng)轉(zhuǎn)子位置角度0~360°),DSP使用數(shù)據(jù)總線在PWM中斷程序中連續(xù)4次讀取RVDT的解算信號(hào)如圖6所示。以上分析可知,RVDT解算電路實(shí)現(xiàn)了無刷電機(jī)轉(zhuǎn)子位置的解算,能夠準(zhǔn)確的反映電機(jī)轉(zhuǎn)子的實(shí)際位置,為電機(jī)調(diào)速控制提高可靠的硬件基礎(chǔ)。





評(píng)論