RS485通訊協(xié)議

RS485總線是一種常規(guī)的通信總線,它不能夠做總線的自動(dòng)仲裁,也就是不能夠同時(shí)發(fā)送數(shù)據(jù)以避免總線競(jìng)爭(zhēng),所以整個(gè)系統(tǒng)的通信效率必然較低,數(shù)據(jù)冗余量較大,對(duì)于速度要求高的應(yīng)用場(chǎng)所不適應(yīng)用RS485總線。同時(shí)由于RS485總線上通常只有一臺(tái)主機(jī),所以這種總線方式是典型的集中—分散型控制系統(tǒng)。一旦主機(jī)出現(xiàn)故障,會(huì)使整個(gè)系統(tǒng)的通信限于癱瘓狀態(tài),因此做好主機(jī)的在線備份是一個(gè)重要措施。
本文引用地址:http://www.104case.com/article/201612/329997.htm**傳統(tǒng)光電隔離的典型電路:
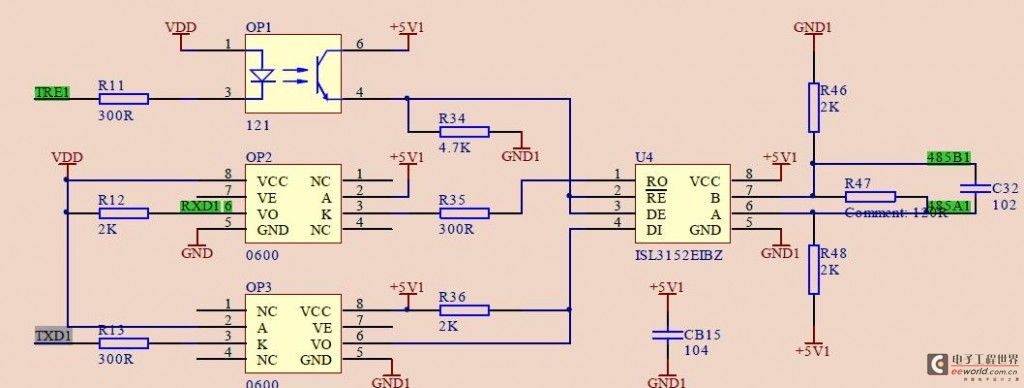
VDD與+5V1(VCC485)是兩組不共地的電源,一般用隔離型的DC-DC來(lái)實(shí)現(xiàn)。通過(guò)光耦隔離來(lái)實(shí)現(xiàn)信號(hào)的隔離傳輸,ISL3152EIBZ與MCU系統(tǒng)不共地,完全隔離則有效的抑制了高共模電壓的產(chǎn)生,大大降低485的損壞率,提高了系統(tǒng)穩(wěn)定性。但也存在電路體積過(guò)大、電路繁瑣、分立器件過(guò)多,傳輸速率受光電器件限制等缺點(diǎn),對(duì)整個(gè)系統(tǒng)的穩(wěn)定性也有一定影響。
***RXD1 :串口接收端
***TXD1 :串口傳輸端
***TRE1 :為控制位:控制發(fā)送還是接收數(shù)據(jù);
當(dāng)TRE1=1(高電平時(shí)),光耦電路121截止,/RE=1(無(wú)效),DE=1(有效),即發(fā)送數(shù)據(jù);
當(dāng)TRE=0
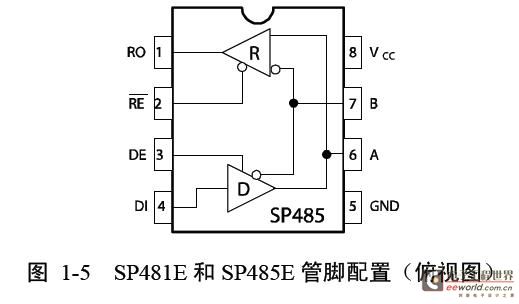
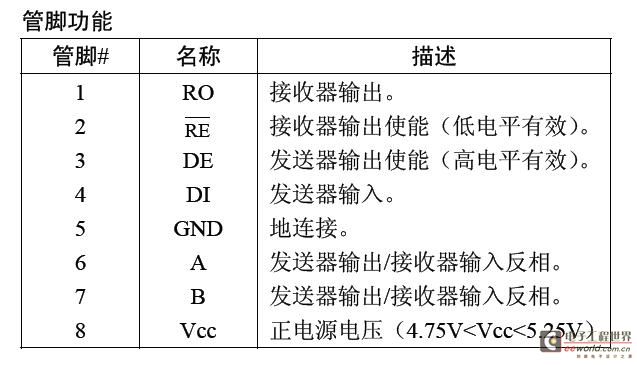
/RE: 485接收端
DE:485發(fā)送端
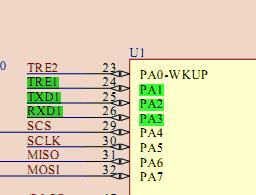
第一步,配置好串口發(fā)送、接收端引腳和485控制引腳;
因?yàn)镽XD1引腳相對(duì)于STM32芯片來(lái)說(shuō)是接收外來(lái)數(shù)據(jù),所以設(shè)置為輸入;
TXD1引腳相對(duì)于STM32芯片來(lái)說(shuō)是對(duì)外發(fā)送數(shù)據(jù),所以設(shè)置為輸出;
TRE1
- void
UART2Init(void) - {
GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);//使能外設(shè)時(shí)鐘 //GPIO結(jié)構(gòu)的成員設(shè)置如下: GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 ; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50M時(shí)鐘速度 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出 GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //485_TX GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復(fù)用推挽輸出 GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //485_RX GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空輸入 GPIO_Init(GPIOA, &GPIO_InitStructure); //串口的結(jié)構(gòu)成員設(shè)置如下: USART_InitStructure.USART_BaudRate = 9600; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; USART_Init(USART2, &USART_InitStructure); USART_Cmd(USART2, ENABLE); // USART_ClearFlag(USART3, USART_FLAG_TC); USART_GetITStatus(USART1, USART_FLAG_TC); - }
第二步:發(fā)送數(shù)據(jù)
這里需要注意的是:
方法一:USART_ClearFlag(USART3, USART_FLAG_TC);
方法二:
剛上電時(shí)出現(xiàn)亂碼的原因:
while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == RESET);
如果USART_FLAG_TC---發(fā)送完成標(biāo)志位
(1)
(2)

STM32的數(shù)據(jù)發(fā)送有兩個(gè)中斷標(biāo)志,一個(gè)是發(fā)送數(shù)據(jù)寄存器空標(biāo)志,一個(gè)是發(fā)送完畢標(biāo)志。兩個(gè)標(biāo)志都可以引起中斷.
要以中斷的方式發(fā)送一個(gè)數(shù)據(jù)包,流程是這樣的:
1.設(shè)置RS485的方向?yàn)榘l(fā)送,使能發(fā)送寄存器空中斷,使能完畢進(jìn)入串口中斷。
2.串口中斷里讀取串口狀態(tài),并填充一個(gè)數(shù)據(jù)到發(fā)送數(shù)據(jù)寄存器,硬件自動(dòng)清除發(fā)送數(shù)據(jù)寄存器空標(biāo)志,串口數(shù)據(jù)發(fā)送開(kāi)始。
3.串口發(fā)送完一個(gè)數(shù)據(jù),發(fā)送數(shù)據(jù)寄存器變空,再進(jìn)入中斷,繼續(xù)填充下一個(gè)數(shù)據(jù),直到最后一個(gè)數(shù)據(jù)填充完,使能串口
4.最后一個(gè)數(shù)據(jù)發(fā)送完畢,再次進(jìn)入中斷,清除發(fā)送數(shù)據(jù)寄存器空標(biāo)志,清除發(fā)送完畢中斷標(biāo)志,清除這兩個(gè)中斷標(biāo)志
- #define
RX_485 GPIO_SetBits(GPIOA,GPIO_Pin_1); - #define
TX_485 GPIO_ResetBits(GPIOA,GPIO_Pin_1); - void
UART2_TX485_Puts(char * str) - {
while(*str) { TX_485; //打開(kāi)485發(fā)送DE端口,關(guān)閉接收/RE端口 DelayNmS(1); USART_SendData(USART2, *str++); while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == RESET); //檢測(cè)發(fā)送數(shù)據(jù)寄存器空標(biāo)志位 DelayNmS(1); RX_485; //關(guān)閉發(fā)送DE端口,打開(kāi)接收/RE485端口, } - }<span
style=" New Roman;"> span>
在485芯片的通信中,尤其要注意對(duì)485控制端DE的軟件編程。為了可靠工作,在485總線狀態(tài)切換時(shí)需要做適當(dāng)延時(shí),再進(jìn)行數(shù)據(jù)收發(fā)。具體的做法是在數(shù)據(jù)發(fā)送狀態(tài)下,

評(píng)論