簡化CAN和LIN車載網絡測試

網絡中的每個CAN節點通過發送包形式的信息進行通信。每個包將包含開銷和凈荷。根據通信類型,包稱為數據幀、遠程幀、過載幀或錯幀。對車載網絡,CAN節點請求數據,然后發送一個遠程幀。如果節點忙著處理數據、執行優先工作,那么節點將把過載幀放在總線上,表明它目前正忙。如果CAN節點發現有校驗和錯誤或數據毀壞,它將發送一個錯幀。CAN有兩種協議格式:CAN2.OA和CAN2.OB。這兩種版本之間的差別是地址中使用的位數不同。CAN2.OA支持11位地址,可以兼容CAN2.OB。CAN2.OB支持29位地址,也稱為擴展地址。
CAN2.OB的典型數據幀內容如圖1所示。

LIN基礎知識
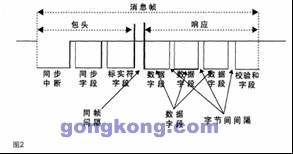
LIN是一種基于公共UART接口的單線串行通信協議。LIN采用單主站多從站組網結構。它是為汽車傳感器和驅動器組網應用開發的,用于車門控制、車燈和車窗操作。LIN主節點將LIN網絡與高級網絡相連,如使用控制器區域網(CAN)。由于電磁干擾和時鐘同步要求,LIN支持最大20Kbps的數據速率。在收到和過濾標識符時,從站任務激活,開始傳輸消息響應。響應由2個、4個或8個數據字節和1個校驗和字節組成。包頭和響應部分構成了一個消息格式。LIN消息格式如圖2所示。
測量頻率振蕩器容限和傳輸延遲,幫助解決位定時問題
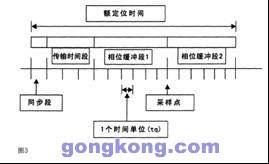
CAN協議的功能、位速率、位采樣點和一個位周期中的樣點數量都可以由用戶編程。在這一過程中,用戶必須知道位定時參數、參考頻率振蕩器容限和系統中各種信號傳輸延遲。根據CAN規范,位時間分成四段,即同步段、傳播時間段、相位緩沖段1和相位緩沖段2。每個段由可以編程的特定數量的時間單位組成。時間單位(tq)是位時間的基本時間單位,其長度由編程人員使用位速率預標量定義。圖3說明了怎樣才能選擇位時間中的時間單位,然后為4個段分配時間單位。同步段(sync_seg)是預計發生CAN總線電平邊沿的位時間部分。在sync_seg外面發生的邊沿與相位段邊沿間的距離稱為該邊沿的相位誤差。傳輸時間段(prop_seg)主要用來補償CAN網絡內部的物理延時。相位緩沖段(phasesegl和phase_seg2)包圍在樣點周圍。再一同步跳轉寬度(SJW)規定了再同步可以在相位緩沖段規定的范圍內把樣點移動多遠的距離,以補償沿到沿誤差。
為使CAN網絡正常運行,必須考慮物理延時和頻率振蕩器的容限范圍,CAN網絡中的每個節點從自己的頻率振蕩器中得到位定時,這個位時間會隨著頻率振蕩器的容限而變化。在實際系統中,由于初始容限偏置和老化及周圍溫度變化,頻率振蕩器參考頻率fclk會偏離額定值。這些偏離之和得到總的頻率振蕩器容限。在對定時寄存器編程時,編程人員必須考慮這一變化。
在DP07000系列上運行的CAN和LIN定時和協議解碼軟件(稱為下DSVNM)自動測量頻率振蕩器容限。用戶可以指定CAN節點的號碼。下DSVNM中的結果將包括有ACK位及沒有ACK位的整體頻率振蕩器容限。TDSVNM還將提供沒有ACK位的數據,表明接收CAN節點對傳輸節點的影響。通過結合使用頻率振蕩器的發送節點和接收節點容限,可以對CAN控制器定時寄存器編程,實現無差錯的網絡性能。
除頻率振蕩器容限信息外,為精確地設置樣點,還要求傳輸延時信息。傳輸延遲在CAN系統中具有重要意義,這是因為CAN支持在競爭訪問網絡的節點之間進行非破壞性判優及同幀確認。
假設有兩個CAN節點A和B。兩個節點A和B之間的單向傳播延遲規定為tprop (A, B)。由于兩個節點之間的信號傳播時間,同步到CAN總線上碼流的任何CAN節點將與發射機碼流不同相。
在圖4中的實例中,兩個節點A和B都是對CAN總線執行判優的發射機。節點A發送幀開始位的時間比節點B早不到一個位時間,因此節點B把自己同步到收到的從隱性到顯性的邊沿。由于節點B是在發送后同步的這一邊沿延遲(A_to_B),因此B的位定時段相對于A發生位移。節點B發送優先權更高的標識符,因此在發送顯性位時,在特定標識符上它會贏得判優,而節點A則傳輸隱性位。節點B發送的顯性位將在延遲(B_to_A)后到達節點A。
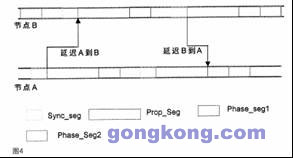
由于頻率振蕩器容限,節點A的樣點的實際位置可能會位于節點A同相的段額定范圍內的任何地方,因此節點B傳輸的位必須在phase_segl開始前到達節點A。這一條件定義了prop_seg的長度。
如果節點B傳輸的從隱性到顯性的邊沿在phase_seg2開始后到達節點A,那么可能會發生節點A對隱性位、而不是顯性位取樣的情況。這會導致誤碼,并使用錯誤標記破壞當前幀。
這個問題要求工程師在對CAN控制器的定時寄存器編程時考慮精確的數據。現在TDSVNM軟件提供了自動測量傳輸延遲的功能。TDSVNM可以自動測量頻率振蕩器容限和傳輸延遲,用戶可以使用來自車載網絡的實際環境數據對寄存器編程。
CAN和LIN消息的協議解碼
一旦物理層在車載網絡中全面運行,固化軟件將與ECU(發動機控制單元)集成在一起。在這一活動過程中,用戶可以以數據鏈路層格式查看OSI的物理層活動。圖5是典型的車載網絡。
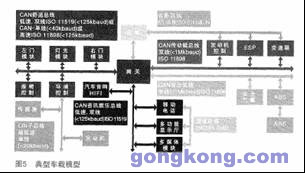
在圖5中,多條總線使用網關互連起來。舒適總線和資訊娛樂總線通常以低于125 Kbps的速率運行,傳動鏈總線和安全總線以500 Kbps~1 Mbps的數據速率運行。LIN總線接入到舒適總線上。在不同總線之間使用網關交換數據。在這個異構網絡中,需要進行的分析如下:
· 觸發特定GAN幀內容,捕獲總線業務,以數據鏈路層格式查看信息
· CAN消息之間的時戳
· 檢定不同網段之間的通信
· 能夠同時查看兩個網段中的協議活動。兩個網段可以是CAN-CAN或CAN-LIN
· 檢定網關的性能,確定網段之間信息交換的時延及信息交換的準確性
通過使用與DP07000系列集成式CAN觸發功能接口的TDSVNM軟件,用戶可以捕獲特定CAN幀內容上的CAN業務。TDSVNM解決方案可以監測CAN2.OA或CAN2.0B幀。用戶可以靈活地選擇幀類型,如數據幀、過載幀、遠程幀或錯幀。根據幀中的內容,用戶可以指明要監測的內容,并發起捕獲。
但是,采用YT格式捕獲的數據很難解釋NRZ數據,很難知道CAN消息中的內容。TDSVNM解碼YT波形,以十六進制或二進制格式顯示數據,節約了時間,不會產生人為錯誤。

評論