驅動步進電機的雙通道音頻放大器

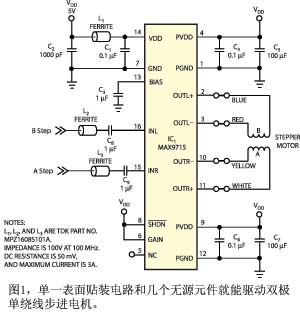
作為替代品,圖1展示了一種步進電機驅動電路,它基于Maxim公司MAX 9715微型表面貼裝2.8W D類音頻放大器,一般能驅動4Ω或8Ω 揚聲器。IC1的兩路輸出的每一路都包含MOSFET H型橋路,各驅動一對輸出線路(OUTR+、OUTR-和OUTL+、OUTL-,)它們分別連到步進電機的A和B繞組。每對都提供標稱開關頻率為1.22 MHz的差分脈寬調制信號。電路的低干擾設計無需輸出線路濾波器。
電容器C1、C3、C4、C6為IC1的功率輸入和偏壓引腳提供旁路,而C5和C7則為D類功率放大器的輸出提供大容量保持電容。電容器C8和C9把放大器的輸入帶寬限制在16 Hz,而L2和L3則抑制較長輸入電纜的電噪聲拾取。p型噪聲過濾器由C1、C2、鐵氧體磁珠L1組成,抑制IC1的電源輸入端的噪聲。合適的控制器向IC1的
A_Step和B_Step輸入端輸送數字脈沖,二者分別驅動電機的右通道和左通道。內部短路和過熱保護裝置可防止放大器受到步進電機或其連接引線導致的過流和短路。
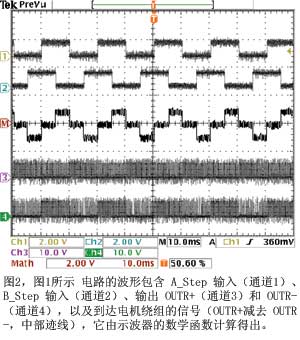
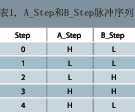
表1說明了A_Step和B_Step脈沖序列,它連續運行步驟 0 到步驟 4,由此按一個方向旋轉典型的步進電機。步驟 4 把電機的軸返回開始位置,并完成它的 360°旋轉。為了使電機反轉,可以從表格底行開始,以便使脈沖模式反轉,向上工作。可以向8號引腳(IC1的低有效輸入端)施加邏輯低電平信號,從而禁用放大器的兩條通道。圖2描繪了電路的輸入和輸出波形。

評論