一種特殊結構的直流電機控制器設計

滑模變結構控制系統是一類特殊的變結構控制系統。起特殊之處在于,系統的控制不僅有切換,而且該切換特性可以迫使系統的狀態在切換面上沿預定的軌跡作小幅度、高頻率的趨近運動-滑動模態運動。這種滑動模態可以設計成與系統的參數及擾動無關。這樣,滑模變結構控制無須系統在線辨識就具有很好的魯棒性。滑模變結構控制近年來已被廣泛應用于處理一些復雜的線性系統、非線性系統、時變、多變量耦合等確定性和不確定性系統,可使系統獲得良好的動態品質[1]。而對于高性能的直流伺服系統,一般要求精度高、無超調、響應速度快且魯棒性好。根據自動調節原理設計的常規PID、PI等控制器,結構簡單,設計方法成熟,也容易實現,但直流伺服系統中的非線性、參數的時變性和外部擾動等都影響系統的控制性能,很難滿足高精度伺服系統的要求。滑模變結構控制的滑動模態對加給系統的干擾和系統的各種攝動具有完全自適應性,所以能完全滿足高精度伺服系統的控制要求[2,4]。
本文引用地址:http://www.104case.com/article/201612/329354.htm2滑模變結構控制器設計
直流伺服系統的結構框圖如圖1所示,雖然在多數情況下常把電機的參數看成常數,但實際當轉速在大范圍內變化時,電機的參數并非常數,而滑模控制正好對參數的變化不太敏感,故使用這種控制方式來控制電機具有很大的優越性。
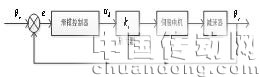
圖1直流伺服系統的結構框圖
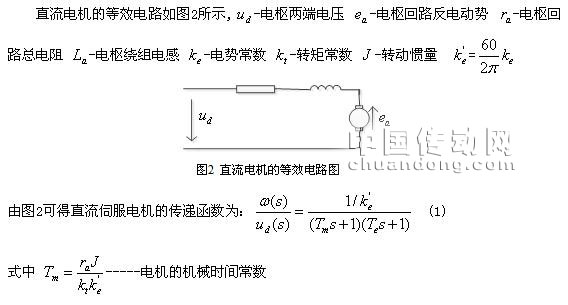
2.1直流伺服系統及其數學模型

針對直流伺服系統中參數時變性和外部擾動等造成的電機模型變化,設計了一種采用滑模變結構控制策略來控制直流伺服電機的方法,并且對系統穩定性進行了分析。進而,對所設計的滑模變結構控制系統與PID控制做了對比仿真;表明,對具有電機參數大范圍攝動的系統,滑模變結構控制系統具有較強的魯棒性和快速性。
2.2滑模變結構控制的基本問題

2.3切換函數s的選取
2.4控制量u的求取

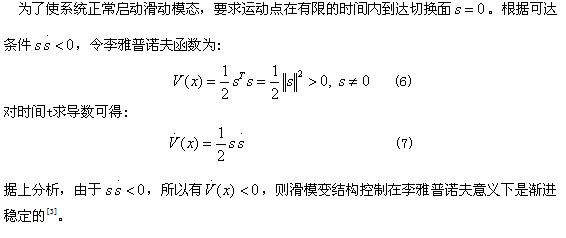
2.5系統穩定性分析
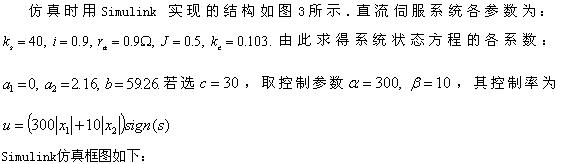
3仿真與結論
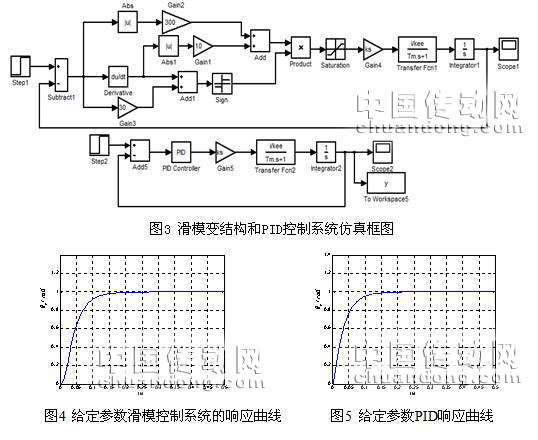
由仿真結果可以看到,顯然,當有電機參數大幅攝動時,滑模變結構控制系統能適應系統參數的變化,響應時間很快,很快達到穩態,無超調;而PID產生了大幅度的超調,對于直流伺服電機控制系統而言,超調過大,嚴重影響加工等過程。
5結束語
本文通過對直流伺服系統分析,并對其設計了滑模變結構控制策略,設計方法簡單,易于實現。從仿真分析可知,滑模變結構控制優于PID控制,具有較強抑制參數攝動,自適應強。另外合理地選擇切換函數和控制率參數,滑模變結構控制系統具有快速性好、無超調、無靜差的優良動、靜態性能,而且系統參數攝動時,具有很好的魯棒性。

評論