600MW機組汽輪機高壓旁路自動控制系統特點

汽輪機高壓旁路系統是單元機組熱力系統重要組成部分,其主要作用是在機組冷態啟動過程中,汽輪機沖轉、升速、帶初負荷時,鍋爐產生的多余蒸汽流量通過旁路系統排除,調整高壓旁路閥開度,以控制主蒸汽壓力,適應機組啟動的各階段對主蒸汽壓力的要求,以保證鍋爐在允許的蒸汽流量下運行。
本文引用地址:http://www.104case.com/article/201612/329109.htm在機組甩負荷工況下,多余的蒸汽排入凝汽器,保證機組啟停工況下的正常運行,高壓旁路系統設備參數如表1,監視畫面如圖0。

0旁路調整
在鍋爐點火升壓開始階段,當啟動分離器壓力達到0.7MPa,逐步開大高旁。
當啟動分離器壓力達到1.0MPa后,利用高旁控制再熱器升壓率不大于0.05MPa/min,維持再熱汽壓在0.3MPa以下。
在主汽壓力低于3.2MPa以前,根據鍋爐汽壓上升情況,汽機盡量開大高旁,開大主汽管道和主汽門前3路疏水至鍋爐疏水擴容器隔離門,以提高循環速度。
當主汽壓力達到3.7MPa,主汽溫度達到320℃以后,蒸汽流量達到空冷島最小防凍流量時,用高旁維持再熱汽壓為1.0MPa。
高旁維持主蒸汽壓力8.92MPa,隨著高中壓控制閥的開啟,高旁開度逐漸關小。
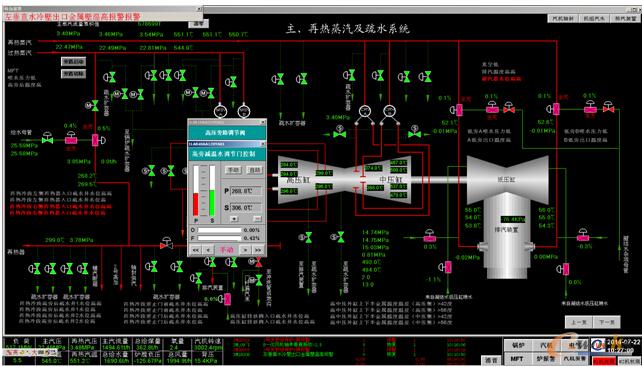
圖0 汽輪機高壓旁路系統
1 高旁運行方式
如圖1。
高旁壓力控制自動方式下,如果高旁指令>2.00%,滿足高旁控制條件,下列條件發生時,進入跟蹤方式,包括高旁壓力控制不在自動方式,高旁指令≤2.00%的情況下,發電機功率≥10MW,或者鍋爐未點火。
滿足定壓方式的條件為不在跟蹤方式、高旁啟動方式和停機方式。滿足帶負荷方式條件為發電機功率≥10MW的情況下,同時滿足高旁壓力跟蹤方式,高旁壓力自動方式,不在停機方式和熱態啟動方式。
如果不存在復位高旁啟動方式條件,鍋爐已經點火的1s脈沖發出,或者投入啟動方式,則滿足高旁啟動方式,如果存在下列條件之一,則復位高旁啟動方式,包括高旁指令>2%的情況下,主蒸汽壓力≥8.00MPa,高旁壓力控制不在自動方式,發電機功率≥10MW,退出啟動方式。
滿足高旁啟動方式下,如果主蒸汽壓力≤1.00MPa,則滿足最小壓力方式,復位最小壓力方式的條件如下,滿足復位高旁啟動方式的條件,或者高旁指令>30.00%。
升壓方式必須同時滿足以下條件,高旁啟動方式,不在最小壓力方式,1.00MPa<主蒸汽壓力<8.00MPa,發出熱態啟動方式脈沖必須同時滿足以下條件,高旁啟動方式下,主蒸汽壓力<8.00MPa,高旁指令≤2.00%。
如果不存在復位停機方式條件,投入停機方式時,機組處于停機方式,出現下列條件之一,則復位停機方式,包括發電機功率<10MW,高旁壓力控制不在自動方式,退出停機方式。
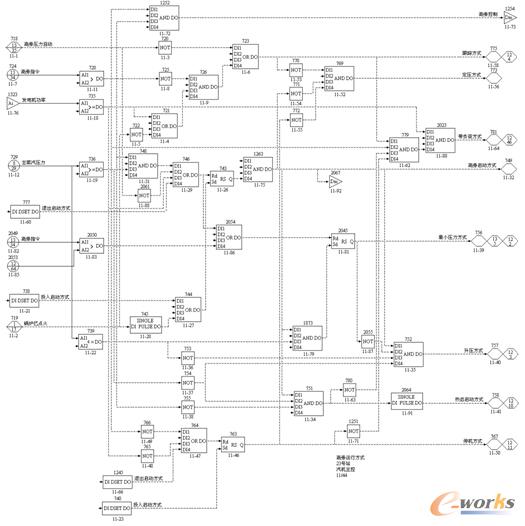
圖1 高旁運行方式
2 高旁壓力設定
高旁壓力設定PID優化算法塊2074的過程變量PV為高壓旁路閥閥位反饋,設定值為30.00%,機組處于以下5種方式之一時,包括最小壓力方式、升壓方式、跟蹤方式、熱態啟動方式、停機方式,則其輸出AO經過限速算法塊677、限幅算法塊678(幅值上限13.8MPa,幅值下限1.00MPa),再加上設定值偏置,作為高旁壓力設定值。
如果存在升壓方式的2s脈沖,則PID優化算法塊2074的跟蹤方式STR=1,AO=TR=限幅算法塊678的輸出;不在升壓方式時,如果主蒸汽壓力高于678塊輸出的規定值,則IL=1,閉鎖AO繼續增加。
模擬手動站優化功能算法塊674輸出高旁壓力目標值,當處于上述5種方式之一時,Y=TR=限幅算法塊678的輸出,否則,由運行人員給出目標值,經過限速算法塊677、限幅算法塊678以后,再加上設定值偏置,輸出高旁壓力設定值。
機組處于帶負荷方式時,設定值偏置由運行人員給出,其輸出范圍Y=(0.4~1)MPa,模擬量輸入選擇算法塊716的DI=1,輸出AO=AI1=Y,否則,DI=0,AO=AI2=0,由于滿足帶負荷方式的5個條件為相與關系,而其中的2個條件中,高旁壓力控制跟蹤方式和自動方式為非關系,所以,高旁壓力設定值偏置=0,限速算法塊677的加速限制AL為除法算法塊的輸出AO=1867輸出/60,當處于跟蹤方式時,AO=AI1=20,AL=20/60=1/3(MPa/min),否則,AO=AI2=699塊的輸出,當處于停機方式時,AO=AI1=0,AL=0,否則,AO=AI2=698塊的輸出,當處于熱態啟動方式時,AO=AI1=0,AL=0,否則,AO=AI2=695塊的輸出,當處于升壓方式時,AO=AI1=0.4,AL=0.4/60=1/150(MPa/min),否則,AO=AI2=分段線性算法塊700的輸出,其參數設置如表2。
表2 分段線性算法塊700參數設置

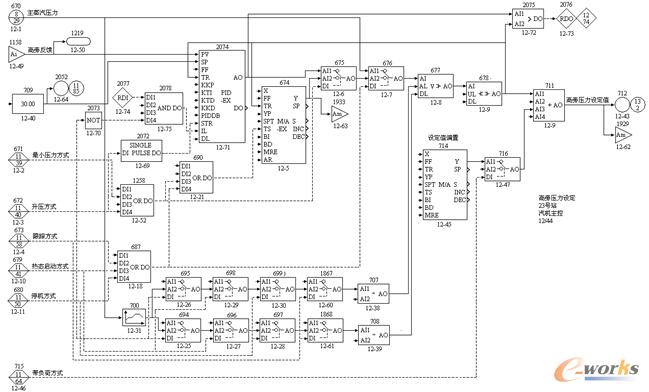
圖2高旁壓力設定
3 高旁壓力控制
高旁壓力控制PID優化算法塊606的過程變量PV為主蒸汽壓力,其與高旁壓力設定值SP之差進行PID運算結果作為自動方式時的輸出AO,經過最大值算法塊614,實現輸出值低限限制,如果存在最小壓力方式3s脈沖(由邏輯非算法塊616、延時開算法塊618、RS觸發器算法塊612實現),614塊AI4=10.00MPa,否則,AI4=-0.50 MPa,AI1=AO,與AI4進行最大值比較,大值作為614塊的輸出,至模擬手動站優化功能算法塊607的輸入X,作為自動方式下的輸出Y=X=高旁壓力控制指令。
高旁反饋與高旁指令之差超過±15%時,發出高旁指令偏差大信號,主蒸汽壓力與高旁壓力設定值之差超過±2.00MPa時,發出高旁壓力偏差大信號。如果606塊輸出與614塊輸出存在偏差,則發出1s的偏差脈沖信號,至606塊的閉鎖減DL=1,限制其輸出AO繼續減小,如果存在1s的偏差脈沖信號,或者高旁壓力控制處于手動方式,則606塊的跟蹤方式STR=1,其輸出AO=TR=高旁壓力控制指令。
當高旁保護關動作時,模擬量輸入選擇算法塊611的輸出AO=AI1=0,作為607塊的跟蹤值TR,此時,跟蹤切換TS=1,輸出Y=TR=0.00%,實現高旁保護關動作時,關閉高壓旁路閥的目的。
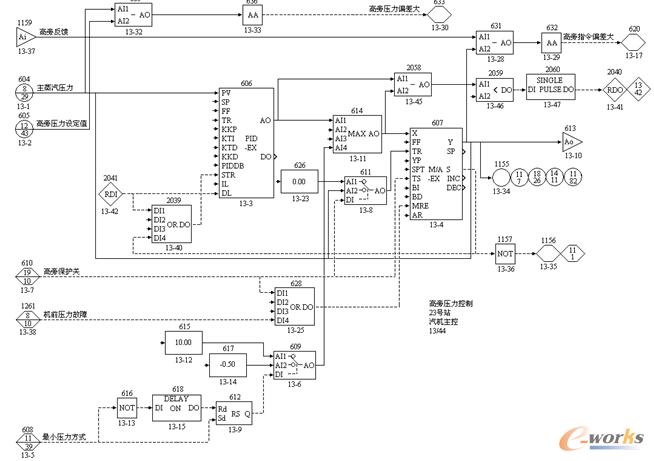
圖3 高旁壓力控制
4 高旁溫度控制
高旁出口蒸汽溫度經過純遲延算法塊2024(純遲延時間1s)、超前滯后算法塊(超前時間常數T1=0s,滯后時間常數T2=0s)的值作為PID優化算法塊870的過程變量PV,與模擬手動站優化功能算法塊2027輸出的設定值SP相比較,其差值進行PID運算以后,輸出AO至2027塊的輸入X,作為自動方式下的輸出Y=X=高旁減溫水控制門指令,如果下列3個條件之一發生時,包括高旁出口蒸汽溫度故障、高旁減溫水隔離閥全關、高旁指令<2%,則強制手動MRE=1,手操器狀態S=1,至870塊的跟蹤方式STR=S=1,其輸出AO=TR=Y=高旁減溫水控制門指令,此時,輸出Y由運行人員給出。
當高旁減溫水隔離閥全關、高旁指令<2%時,2027塊的跟蹤切換TS=1,Y=TR=模擬量輸入選擇算法塊892的輸出AO,DI=1時,AO=AI1=0%,實現關閉高旁減溫水控制門的目的,即高旁減溫水隔離閥全關時,閉鎖其控制門不能開啟。
高旁減溫水控制門反饋>95%時,發出高旁減溫水控制門全開信號,高旁減溫水控制門反饋<5%時,發出高旁減溫水控制門全關信號。
主蒸汽溫度通過限幅算法塊2132(幅值上限UL=600℃,幅值下限DUL=0℃),在經過模擬量輸入選擇算法塊2129,輸出主蒸汽溫度信號,當點質量檢測功能算法塊2131判斷溫度信號壞質量時,主蒸汽溫度信號將保持當前值不變。
主蒸汽壓力和主蒸汽溫度分別經過限幅算法塊1840(幅值上限UL=25.5MPa,幅值下限DL=0.00MPa)、1843(幅值上限UL=571℃,幅值下限DL=0℃)以后,作為水和水蒸氣參數算法塊Ⅱ的輸入參數P、溫度t,1852塊的模式選擇為MODE2:PT2HSteam,輸出主蒸汽焓值h,1844塊的模式選擇為MODE3:PT2ρSteam,輸出過熱蒸汽密度ρ,與常系數76.723相除以后,進行開方運算,經過限幅算法塊1848(幅值上限UL=1.05,幅值下限DL=0.95),與高壓旁路閥閥位反饋經過分段線性算法塊1836以后對應的旁路容積流量相乘,輸出高壓旁路流量,分段線性算法塊1836的參數設置如表3。

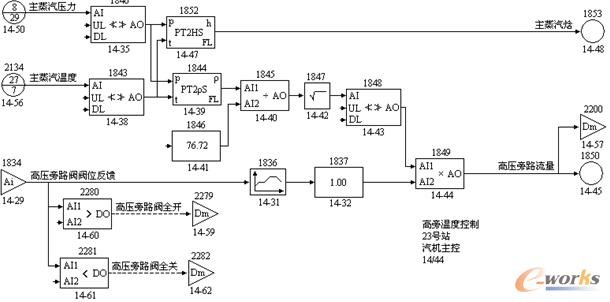
圖4 高旁溫度控制
表3 分段線性算法塊1836參數設置
高壓旁路閥閥位反饋>95%時,發出高壓旁路閥全開信號,高壓旁路閥閥位反饋<5%時,發出高壓旁路閥全關信號。
5 高旁出口溫度
高旁出口蒸汽溫度1和高旁出口蒸汽溫度2信號正常情況下,通過加法算法塊1369(k1=k4=0.5),取其平均值作為高旁出口蒸汽溫度,高旁出口蒸汽溫度1或者高旁出口蒸汽溫度2如果高于600℃、低于-50℃,或者1s內溫度變化±5℃時,表明高旁出口蒸汽溫度1或者高旁出口蒸汽溫度2信號故障,通過模擬量輸入選擇算法塊1359、1980,剔除故障信號,選擇另一路信號作為高旁出口蒸汽溫度,至高旁減溫水控制PID優化算法塊870的過程變量PV,剔除故障信號過程如下,如果高旁出口蒸汽溫度1故障,通過模擬量輸入選擇算法塊1359,其DI1=1,AO=AI1=高旁出口蒸汽溫度2,加法算法塊1369的AI1=AI4=高旁出口蒸汽溫度2,即高旁出口蒸汽溫度=高旁出口蒸汽溫度2,同理,如果高旁出口蒸汽溫度2故障,通過模擬量輸入選擇算法塊1980,其DI1=1,AO=AI1=高旁出口蒸汽溫度1,加法算法塊1369的AI1=AI4=高旁出口蒸汽溫度1,即高旁出口蒸汽溫度=高旁出口蒸汽溫度1。
當高旁出口蒸汽溫度1和高旁出口蒸汽溫度2信號故障時,輸出高旁出口蒸汽溫度故障信號,作為高旁減溫水控制切手動條件之一。
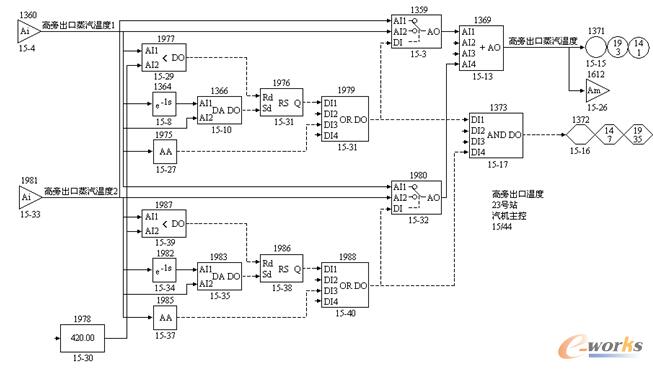
圖5 高旁出口溫度
6 高旁閥電磁閥/入口閥
通過設備驅動算法塊783,可以手動關閉高旁入口電動門,并且顯示入口電動門已經關閉,在遠方操作方式下,如果沒有故障信號,可以打開高旁入口電動門,并且顯示入口電動門已經打開。如果存在高旁保護快關信號,通過設備驅動算法塊795的超馳聯鎖關指令Ovr2,輸出關閉高旁閥指令Out2。
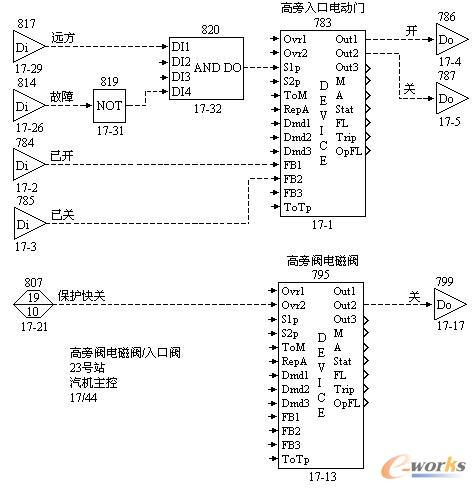
圖6 高旁閥電磁閥/入口閥
7 高旁噴水門/控制門
高旁指令>2.0%時,RS觸發器Q=1,經過非門以后,至設備驅動算法塊823的超馳聯鎖關指令Ovr2=0,高旁噴水隔離門不關,當高旁指令<1.7%時,復位RS觸發器Q=1→0,經過非門以后,至設備驅動算法塊823的超馳聯鎖關指令Ovr2=0→1,關閉高旁噴水隔離門,經過對應的設備運行狀態反饋FB2,顯示高旁減溫隔離門已經關閉。
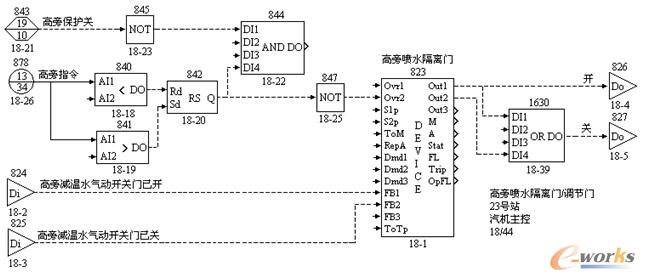
圖7 高旁噴水門/控制門
8 高旁保護快關
在給水壓力信號正常情況下,如果給水壓力≤6MPa,則發出噴水壓力低信號,在高旁出口蒸汽溫度無異常情況下,其信號>420℃,延時10s,或者存在MFT 10s脈沖信號,則發出高旁保護快關信號,分別至高旁壓力指令、高旁閥電磁閥、高旁噴水隔離門相關邏輯。
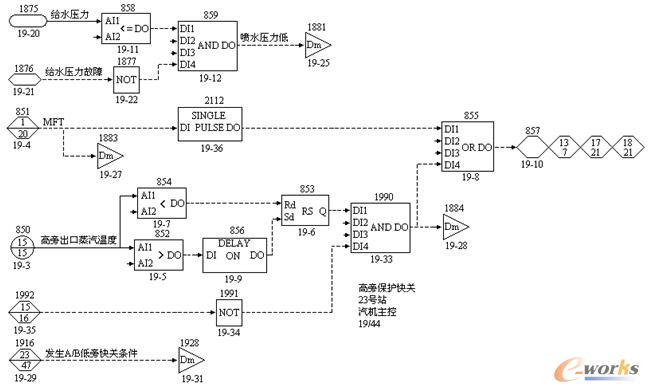
圖8 高旁保護快關
結語
通過以上分析可知,高壓旁路控制系統功能具備如下2個方面,在正常情況下具有自動控制功能,控制旁路系統蒸汽的溫度和壓力,在異常情況下具有自動保護功能,快速開啟旁路閥門,維持入口壓力,同時,將旁路閥后的溫度和壓力控制在安全范圍內。

評論