DIY系列:簡簡單單自制平衡機(jī)器人

當(dāng)機(jī)器人要倒下的時(shí)候,馬達(dá)就啟動(dòng)了,使機(jī)器人向它將要倒下的方向移動(dòng)。電動(dòng)機(jī)轉(zhuǎn)矩的重心高于馬達(dá)而使機(jī)器人保持平衡。
本文引用地址:http://www.104case.com/article/201612/328897.htm
▲簡易平衡機(jī)器人
第一步:所需材料:
你需要以下的設(shè)備來完成簡易平衡機(jī)器人:
1、小的電機(jī);(可以把你的四驅(qū)車拆了)

2、一些齒輪(我想你的四驅(qū)車還是不能幸免)
3、一根軸(你就放棄吧,肯定是拆了你的四驅(qū)車了)

4、兩個(gè)輪子(……)
5、一些塑料片,用來做機(jī)器人的軸承套和脖子(脖子,那姑且就這么翻吧)

6、2個(gè)電池盒(2節(jié)一組的那種)

7、一些電線

8、一個(gè)紐扣電池
9、一個(gè)帶金屬杠桿的單刀雙擲開關(guān)
10、一個(gè)撥動(dòng)開關(guān)
11、一枚釘子
12、烙鐵
13、膠水
第二步:
在這一步關(guān)鍵就是要把電機(jī)和軸、輪子連接起來,你可以使用上述材料里準(zhǔn)備的齒輪、電機(jī)、輪子等用你想到的任何辦法把他們有機(jī)的組合起來,各自發(fā)揮吧,或者你也可以用減速電機(jī)完成,你怎么完成它并不關(guān)鍵,關(guān)鍵是完成它就對(duì)了。



第三步:連接機(jī)器人的脖子和頭
把塑料片用膠水固定到電機(jī)上,然后在塑料片的兩邊分別涂上膠水,把電池盒粘在最高處。(好吧,電池盒和電機(jī)之間這段的塑料片就叫做脖子了)


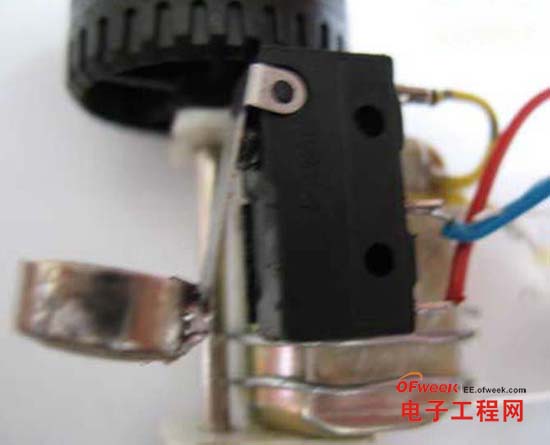
第四步:安裝傳感器
把紐扣電池焊接到微動(dòng)開關(guān)上。把釘子放在火上加熱,穿過塑料片,然后把這個(gè)微動(dòng)開關(guān)用膠水粘在這個(gè)釘子上。注意釘子的位置,要保證紐扣電池能正好碰到地面,這很關(guān)鍵。(這個(gè)位置的確定很關(guān)鍵,記得保證機(jī)器人垂直于平面)這是這個(gè)機(jī)器人成功與否的關(guān)鍵。


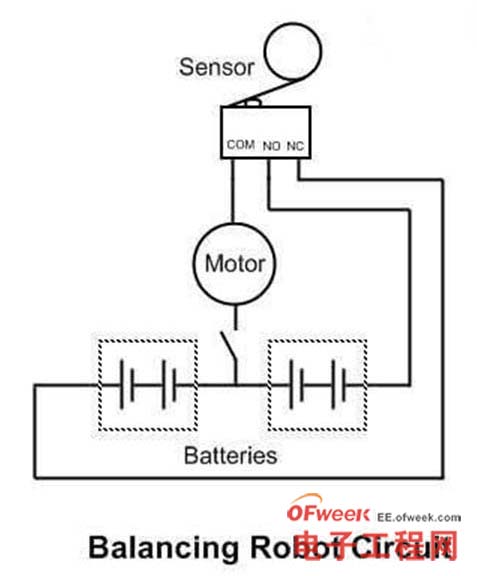
第五步:連接開關(guān)
在電池盒的一段連上一根線,作為正極,另一端連撥動(dòng)開關(guān),撥動(dòng)開關(guān)在連一根線,作為負(fù)極,然后與馬達(dá)相連。


第六步:連線
你的連線必須使機(jī)器人向它要倒下的方向移動(dòng)。
第七步:測試
裝上電池,讓我們看看它是否正常工作吧。調(diào)整微動(dòng)開關(guān)的位置,讓它工作的更好。如果顛倒了,那就更換一下正負(fù)極的電線。

后記:
這個(gè)平衡機(jī)器人相當(dāng)?shù)?ldquo;簡陋”,但是卻是不平凡的,首先它用簡單的方式實(shí)現(xiàn)了倒鐘擺的平衡,雖然時(shí)間不久,但就其原理來說卻是一切平衡機(jī)器人的基礎(chǔ),另外它也說明了自動(dòng)控制的一種重要的控制方式,反饋,閉環(huán)反饋,這可能對(duì)剛剛接觸機(jī)器人或者說其他自動(dòng)控制系統(tǒng)的人的有趣的教育模式;其次,它告訴我們一個(gè)事實(shí),人類的想象力是驚人的,也讓我們反思,有很多的時(shí)候我們用很復(fù)雜的方法卻來解決很簡單的問題,同樣卻有人用簡單的方法來解決復(fù)雜的問題。
我想也許有很多人并不屑這個(gè)機(jī)器人的制作,但是對(duì)于剛剛接觸機(jī)器人的朋友來說,這確實(shí)是個(gè)很好的機(jī)器人,有趣,而且制作起來不困難。

評(píng)論