CAN_幀

15.2.1 CAN的基本概念
(1)報文(Messages)
總線上傳輸的信息即為報文,它們以若干個不同的固定格式發送,但長度受限。當總線空閑時,總線上任何單元均可發送新報文。
(2)信息路由(Information Routing)
在CAN系統中,CAN不對單元分配站地址,報文的尋址內容由報文的標識符指定。標識符不指出報文的目的地,但是這個數據的特定含義使得總線上所有單元可以通過報文濾波來判斷該數據是否與它們相符合。
(3)位速率(Bit Rate)
即總線的傳輸速率。在一個給定的CAN系統中,位速率是唯一的,也是固定的。
(4)優先權(Priorities)
在總線訪問期間,標識符定義一個靜態的報文優先權。
5)遠程數據請求(Remote Data Request)
當總線上某單元需要請求另一單元發送數據時,可通過發送遠程幀實現遠程數據請求。
(6)多主機(Multimaster)
總線空閑時,總線上任何單元都可以開始向總線上傳送報文,但只有最高優先權報文的單元可獲得總線訪問權。
(7)仲裁(Arbitration)
總線空閑時,若同時有兩個或兩個以上單元開始發送報文,總線訪問沖突運用逐位仲裁規則,借助標識符ID解決。
(8)錯誤標定和恢復時間(Error Signaling and Recovery Time)
任何檢測到錯誤的單元會標志出已被損壞的報文。此報文會失效并將自動重傳。如果不再出現錯誤,則從檢測到錯誤到下一報文的傳送開始為止,恢復時間最多為31位的時間。
(9)故障界定(Fault Confinement)
CAN單元能夠把永久故障和短暫的干擾區別開來。
(10)連接(Connection)
CAN通信鏈路是一條可連接多單元的總線。理論上,總線上單元數目是無限制的,實際上,單元數受限于延遲時間和總線的電氣負載能力。
(11)單通道(Single Channel)
CAN總線由單一通道組成,借助數據重同步實現信息傳輸。(12)總線數據表示(Bus Values)
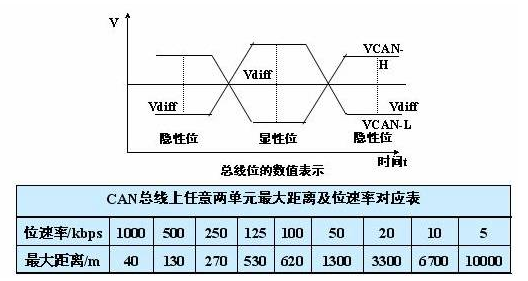
CAN總線上有兩種互補邏輯數值:顯性(Dominant)電平和隱性(Recessive)電平。若顯性位與隱性位同時發送,總線上數值將是顯性。
(13)應答(Acknowledgment)
所有接收器對接收到的報文進行一致性檢查。對于一致的報文,接收器給予應答;對于不一致的報文,接收器做出標志。
15.2.2 CAN總線的位數值表示與通信距離
CAN總線上用顯性(Dominant)和隱性(Recessive)兩個互補的邏輯值表示0和1。當在總線上出現同時發送顯性位和隱性位時,總線上數值將出現顯性。
15.2.3 報文傳輸和幀結構
報文傳輸由以下4個不同的幀類型表示和控制:
數據幀:數據幀將數據從發送器傳輸到接收器。
遠程幀:總線單元發出遠程幀,請求發送具有同一標識符的數據幀。
錯誤幀:任何單元檢測到總線錯誤就發出錯誤幀。
過載幀:過載幀用于在先行和后續數據幀(或遠程幀)之間提供一附加的延時。
數據幀和遠程幀可以使用標準幀及擴展幀兩種格式。它們用一個幀間空間與前面的幀分隔。
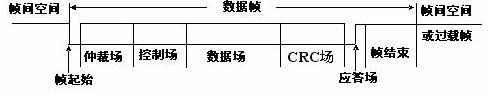
(1)數據幀
數據幀由7個不同的位場組成:幀起始、仲裁場、控制場、數據場、CRC 場、應答場、幀結尾。數據幀組成如下圖。
(2)遠程幀
遠程幀也有標準格式和擴展格式,而且都由6 個不同的位場組成:幀起始、仲裁場、控制場、CRC 場、應答場、幀結尾。遠程幀的組成如下圖。

(3)出錯幀
錯誤幀由兩個不同的場組成。第一個場是由不同站提供的錯誤標志(ERROR FLAG)的疊加;第二個場是錯誤界定符。出錯幀的組成如下圖。

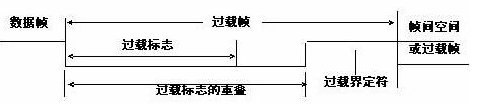
(4)過載幀
過載幀包括兩個位場:過載標志和過載界定符。過載幀的組成如下圖。
15.2.4 錯誤處理
1)錯誤檢測( 5種不同的錯誤類型)
位錯誤:單元在發送位的同時也對總線進行監視。如果所發送的位值與所監視的位值不相同,則在位時間里檢測到一個位錯誤。
填充錯誤:如果在使用位填充法進行編碼的信息中,出現了6個連續相同的電平時,將檢測到一個填充錯誤。
CRC錯誤:CRC序列包括發送器的CRC計算結果。如果計算結果與接收到的CRC序列的結果不相符,則檢測到一個CRC錯誤。
形式錯誤:當一個固定的位場含有1個或多個非法位,則檢測到一個形式錯誤。
應答錯誤:只要在應答間隙期間所監視的位不為顯性,則發送器會檢測到一個應答錯誤。
2)錯誤標定
檢測到錯誤條件的站通過發送錯誤標志指示錯誤。對于“錯誤主動”的節點,錯誤信息為“主動錯誤標志”,對于“錯誤被動”的節點,錯誤信息為“被動錯誤標志”。
15.2.5 故障界定
至于故障界定,單元的狀態可能為下列三種之一:錯誤主動、錯誤被動、總線關閉。
錯誤主動的單元可以正常地參與總線通信并在檢測到錯誤時發出主動錯誤標志。
錯誤被動的單元不允許發送主動錯誤標志。錯誤被動的單元參與總線通信,在錯誤被檢測到時只發送被動錯誤標志。而且,發送以后,錯誤被動單元將在初始化下一個發送之前處于等待狀態。
總線關閉的單元不允許在總線上有任何的影響。
15.2.6 位定時與同步
位定時與同步定義CAN總線的通信速率,相關名詞有:
標稱位速率(Nominal Bit Rate):一理想的發送器在沒有重新同步的情況下每秒發送的位數量。
標稱位時間(Nominal Bit Time):1/標稱位速率。標稱位時間可分成幾個不重疊的片段,分別是:同步段(SYNC_SEG)、傳播段(PROG_SEG)、相位
緩沖段1(PHASE_SEG1)、相位緩沖段2(PHASE_SEG2)。
同步段(SYNC_SEG):用于同步總線上不同的節點,這一段內要有一個跳變沿。
傳播段(PROG_SEG):用于補償網絡內的物理延時時間。它是總線上輸入比較器延時和輸出驅動器延時總和的2倍。
相位緩沖段1(PHASE_SEG1)、相位緩沖段2(PHASE_SEG2):用于補償邊沿階段的誤差。這兩個段可以通過重新同步加長或縮短。
采樣點(Sample Point):讀總線電平并解釋各位的值的一個時間點。采樣點位于相位緩沖段1之后。
信息處理時間(Information Processing Time):信息處理時間是以一個采樣點作為起始的時間段。采樣點用于計算后續位的位電平。
時間份額(Time Quanta):時間份額是派生于振蕩器周期的固定時間單元。存在一個可編程的預比例因子,將整體數值范圍為1-32的整數,以最小時間份額為起點,時間份額的長度為:
時間份額=m * 最小時間份額,其中,m為預比例因子
時間段長度(Length of Segments):同步段為1個時間份額,傳播段的長度可設置成1、2…8個時間份額,相位緩沖段1的長度可設置成1、2…8個時間份額,相位緩沖段2的長度為相位緩沖段1和信息處理時間之間的最大值,信息處理時間少于或等于2個時間份額。
一個位時間總的時間份額值可以設置在8~25的范圍。

評論