Matlab的孤立逆變源的設計方案

基于Matlab軟件平臺,采用雙環控制策略設計的逆變源,利用Matlab-Simulink-SimPowerSystems的工具箱進行建模仿真,驗證了本文所設計方案的可行性和有效性。
本文引用地址:http://www.104case.com/article/201612/327879.htm引言
隨著太陽能、風能等可再生能源的發展,分布式發電以其環境污染少、能源綜合利用率高、供電可靠等優點,逐漸成為了各國家競相研究的熱點,在美國、歐洲等技術成熟的國家和地區,以將其廣泛應用在微電網中。逆變電源作為一種有效的電力供應源,成為了微電網的重要組成部分,并在微電網的研究和實施中得到了廣泛的應用。
本文設計的基于PWM的孤立逆變電源,其控制模型采用電壓外環和電流內環雙環控制策略,電壓外環和電流內環均采用PI控制方式。應用Matlab軟件建立實驗模型進行仿真,通過仿真驗證了控制系統設計方案的合理性,以及雙環控制策略的應用效果,分析仿真結果證明了系統設計方案的合理性和有效性。
1、PWM逆變器的電路結構和工作原理
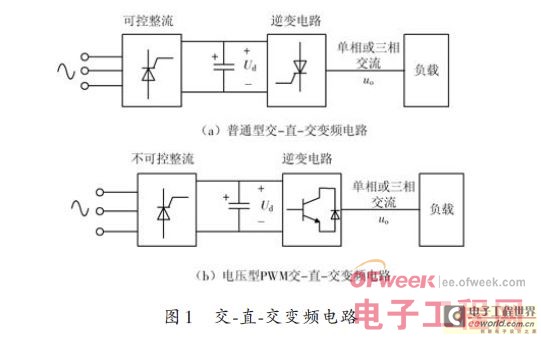
在交-直-交變頻器中,通常要求直流電路采用可控硅整流電路,如圖1(a)所示。逆變輸出的電壓Uo的大小可以通過改變Ud的大小來控制。通過對逆變器觸發電路頻率的控制,可以改變輸出電壓Uo的頻率。但是,這種變頻電路存在有缺陷:如果輸出的交流電壓為含有較多諧波的矩形波,這無論是對負載或是交流電網都是不利的;如果輸出功率用相控方式來調節,就會使輸入功率因數降低,同時由于有濾波大電容存在于中間直流環中,使得調節輸入功率時慣性較大,系統響應緩慢。
為解決上述缺陷,可以采用如圖1(b)所示的變頻電路。這種電路通常稱為PWM(PulseWidthModula-tion)型變頻電路,其基本的工作原理是對逆變電路中開關器件的通斷進行有規律的控制,使輸出端得到等幅不等寬的脈沖列,并用這些脈沖列來替代正弦波。按要求的規則對脈沖列的各脈沖寬度進行調制,既可改變電路輸出電壓的大小,又可以改變輸出電壓的頻率。
2、孤立逆變源雙環控制策略
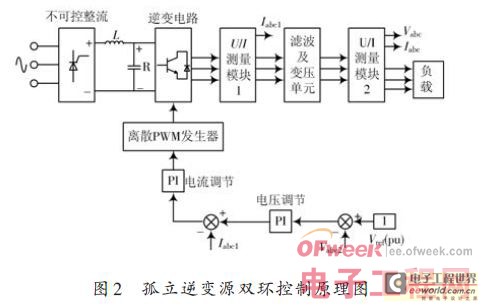
如圖2所示,為設計的基于PWM孤立逆變源的電壓電流雙環控制原理圖。控制外環為電壓控制環,電壓Vabc的反饋值由測量模塊2測得,并與給定的參考值進行比較,誤差信號經過PI控制器調節后作為電流內環基準;控制內環為電流控制環,由測量模塊1測得的反饋的電流值Iabc1與電流基準進行比較產生的誤差信號,經過PWM發生器離散化之后產生PWM控制信號。
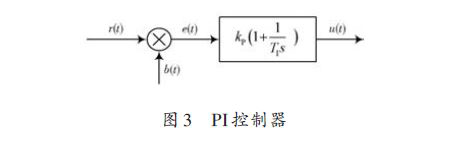
PI控制器是具有比例-積分控制規律的控制器,其框圖如圖3所示,其控制規律是指控制器的輸出信號u(t)既反映輸入信號e(t),又反映e(t)對t的積分,即:

式中:kP為可調比例系數,TI為可調積分時間常數。
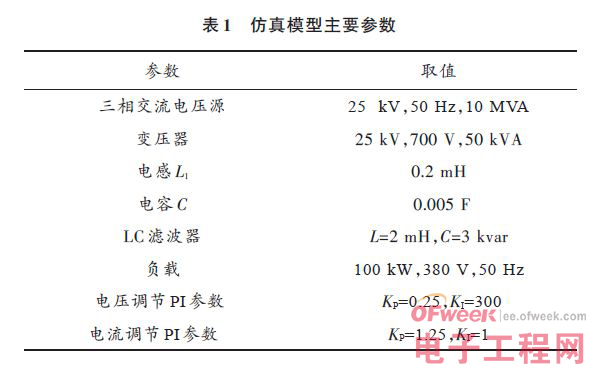
在控制工程實踐中,PI控制器主要用來改善控制系統的穩態性能。PI參數的準確設置,對控制效果至關重要,可調積分時間常數TI會影響系統達到穩定的時間和穩定性,可調比例系數kP會對系統的響應時間產生影響。在本文設計的孤立逆變源中,利用工程整定的方法,對外環電壓反饋值vabc進行調節的PI調節器,其參數整定值為:kP=0.25,TI=300;對內環電流反饋Iabc1進行調節的PI調節器,其參數整定值為:kP=1.25,TI=1.
3、仿真結果
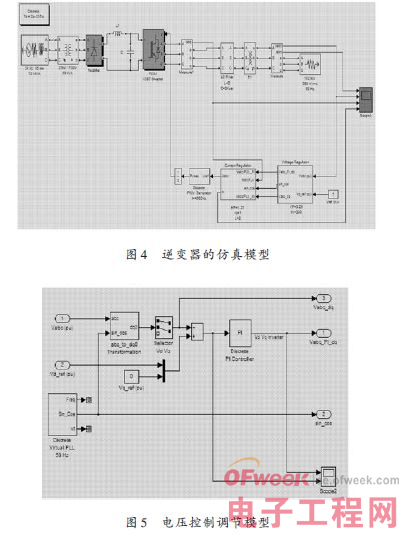
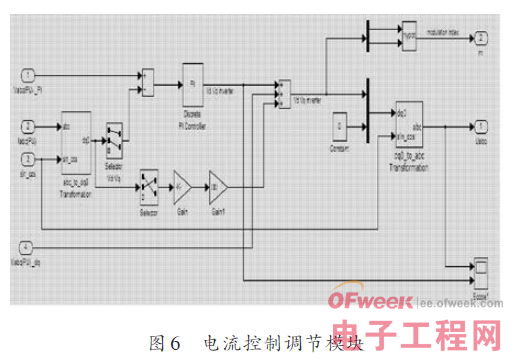
根據控制方案,設計的孤立逆變源的建模仿真使用Matlab-Simulink-SimPowerSystems軟件平臺來完成。仿真時間設定為0.3s,仿真數據均采用標幺值,仿真模型如圖5所示。設計的電壓外環和電流內環的PI控制模型分別如圖6、圖7所示。
模型仿真的主要參數如表1所示。
3.1逆變源仿真結果
根據表1的參數設置進行建模仿真,仿真開始后,逆變電源在很短暫的時間就達到了穩態運行,經測量模塊2測量輸出的電流Iabc和電壓Vabc,測量模塊1測量輸出的電流Iabc1,以及調制系數m的輸出波形如圖7、圖8所示。
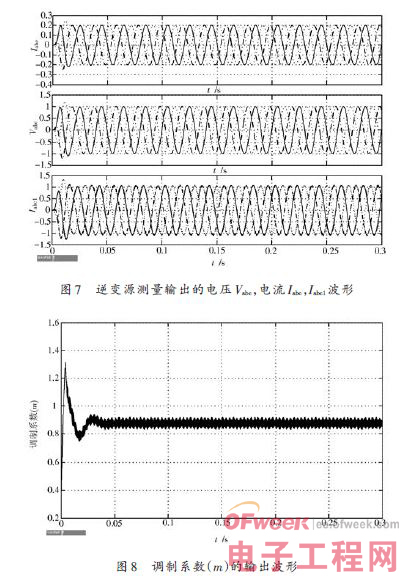
逆變電源運行達到穩態后,由圖7輸出的電壓和電流波形分析可知,逆變電源達到穩后的運行狀態非常穩定,達到了預期的效果。由圖8可知,調制系數m在經過短暫的震蕩之后收斂到0.85~0.9穩定的區間,表明了調制控制的穩定性。
3.2電壓控制PI仿真結果
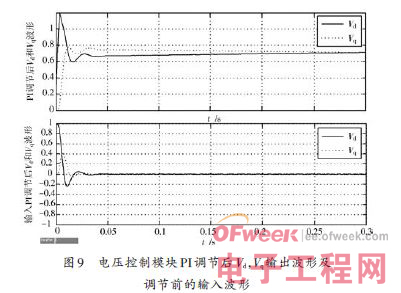
逆變電源運行達到穩態后,電壓外環控制模塊的PI調節的輸入信號及經過PI調節后的輸出信號如圖9所示。由圖9的輸出波形可知,輸入到PI的Vd,Vq信號經過短暫的波動收斂到0,并輸入到PI調節器中,經PI調節器調節后輸出較為穩定的誤差信號,作為電流內環控制的基準信號,保證了電流內環控制的穩定性。
3.3電流控制PI仿真結果
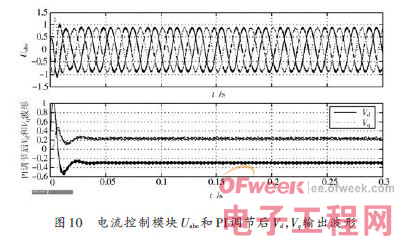
逆變電源運行達到穩態后,電流內環控制模塊經過PI調節后的輸出Vd,Vq和電壓Uabc的波形如圖10所示。
在電流內環調節中,電流經d-q變換得到信號與經電壓外環控制后輸入的基準信號作比較,比較結果作為電流控制環的PI調節輸入信號,經PI調節后輸出穩定的控制信號Vd,Vq,如圖10所示,輸出信號經過短暫的震蕩收斂到了一個穩定的狀態,表明了電流內環控制系統穩定性。輸出的電壓Uabc作為PWM發生器的輸入信號,經過PWM發生器離散化之后產生PWM控制信號,形成一個閉環控制系統,保證了整個控制系統的穩定運行。
4、結語
本文通過分析分布式發電作為高效、清潔的發電方式,以其具有投資少、可與環境兼容等優點,及其在微電網中得到了廣泛的應用。逆變電源作為微電網的重要組成部分,其設計運行的穩定性、有效性和可行性,直接會影響到整個微電網供電的電能質量。方案設計的電壓外環和電流內環雙環控制的逆變電源,電壓外環可以增加系統的穩定性和消除靜態誤差,電流內環可以提高系統的快速性和動態特性。采用PI控制策略,利用Matlab軟件建立了實驗仿真平臺。仿真結果表明,本方案所設計的逆變電源具有很好的穩態性能和動態性能,控制系統設計合理穩定,參數的選擇合理有效。

評論