帶PC機串口通訊的機器人控制系統電路設計

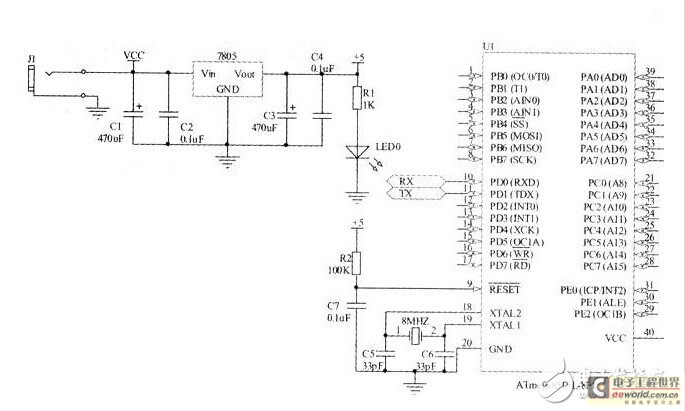
用AVRmega8515作一個帶PC機串口通訊的最小單片機機器人控制系統,電路圖見下圖。使用時用WINDOWS自帶的超級終端,把速率調整到9600,8個數據位.1個停止位,無奇偶效驗,無流量控制(握手協議Xon/Xoff).接上串口線,按照屏幕提示輸入數據就可以直觀地控制3臺舵機的旋轉角度。
本文引用地址:http://www.104case.com/article/201612/326691.htm以下介紹一款24路機器人專用控制器。其主要是供不熟悉單片機的讀者來使用。該系統整體硬件基本和上述最小單片機控制系統一樣,還增加了一片采用I2C 總線通訊方式的24C256 EEPROM存儲器,用來記錄24路龐大的動作表,主控單片機也是AVRmega 8515.整個動作編程通過PC機串口終端仿真器來實現的。可同時控制24臺舵機,并且能分別對臺舵機進行速度控制,其中可以插入循環、延時指令。該控制器能讓制作者從繁瑣的單片機編程中解放出來,并且能讓有PC機編程能力的讀者進行二次開發。

評論