基于故障檢測的路燈LED驅動電源的研究

1. 引言
本文引用地址:http://www.104case.com/article/201612/325757.htm近年來,伴隨著全球經濟的持續增長和人民生活水平的提高,煤、石油、天然氣等能源短缺問題及全球溫室氣體排放量增加等環境問題日益惡化。全球普遍面臨著能源短缺和能源危機的嚴峻局勢,各國也都在尋求開發新能源和提高能源利用率的措施。對于生物能、太陽能、風能、地熱能等新能源由于其自身能量密度低、供能過程的間歇性、隨機性、不能大規模存儲等缺點,使得其開發和利用的過程相當漫長。故最有效的方法是提高現有能源的利用率。而電力能源的消耗占總能耗的40%左右,在我國,照明用電又占電力能耗的12%[1,2]。
所以發展LED產業的意義深遠。
2. LED的故障分析
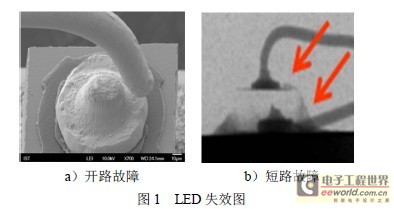
目前,街道照明用LED光源功率大多數處于100W-200W之間。由于LED單顆功率等級偏低,因此,需要通過串并聯組成LED陣列。但是由于LED 是一種新興的光源,在其實際的應用過程中還存在很多問題。其中LED常見的失效情況是不亮,即LED通電流后不發光,此時可能是開路故障或是短路故障。對于開路故障,可能是LED封裝出現斷線或粘晶等缺陷。對于短路故障,可能是由于LED沒有流經LED芯片,而是流經“旁門左道”引起的。兩種故障的示意圖如圖1所示。對于LED不亮這種失效情況,最常見的是開路故障。
由于在大功率照明應用中,并聯支路較多,為每一支路提供獨立的驅動器固然可以實現各支路的獨立恒流,并且不會因為單顆LED出現短路故障而影響其他LED的正常工作。但是需要每路設置開路保護。這樣每串LED都設有獨立驅動器和開路保護會使得LED驅動器體積過大,成本過高,不利于安裝和使用。所以目前應用比較多的是采用總電流閉環控制的控制策略。
但是如果采用總電流閉環,一旦多并聯支路中有某一串LED開路,則其他并聯支路中的供電電流勢必會增大,就會造成連鎖反應,會有并聯支路將會因為電流增大,陸續出現開路故障,直至全部并聯支路開路。如果某顆LED出現短路故障,那么流經本串LED的電流會增加,進而會導致其他LED因過流而損壞。
本文針對這一問題對LED串并聯支路的開路故障檢測和短路故障進行了研究,提出了一種可及時識別開路數,從而保證每一并聯支路電流維持不變的LED驅動器結構。
3. 電路設計
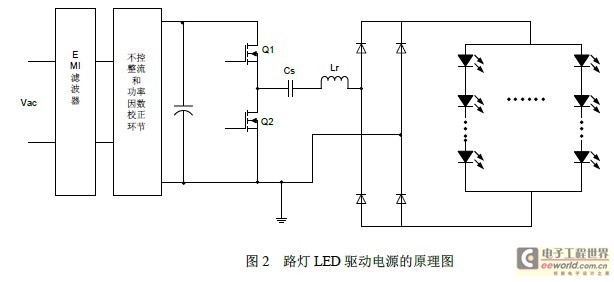
如圖2所示是路燈LED恒流驅動電源的原理示意圖。其中,LED陣列采用14串、8路并聯的形式。
驅動器電路采用兩功率級結構。前級為功率因數校正環節,實現功率因數校正為后級的DC-DC變換器提供穩定母線。后級是諧振半橋DC-DC電流源變換器,控制器通過開關頻率調節,實現恒流驅動。控制
系統采用Infineon公司的XC822單片機作為控制芯片。
3.1 功率因數校正環節的設計
為提高LED驅動電源的功率因數,在驅動電源中加入功率因數校正電路。目前對于100W-150W的驅動電源,臨界模式(CRM)的Boost電路因為其電路中器件的電壓電流應力小,且二極管沒有反向恢復問題,控制電路設計簡單等優點而被廣泛的采用,其輸出為400V的穩壓值。
3.2 諧振直流變化器的設計
如圖2所示,后級是一個諧振直流變換器。它是由是由一個LC諧振逆變器與一個不控整流橋組成的。
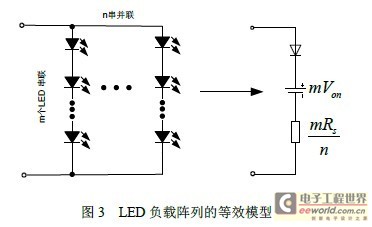
由[3]可知,LED負載可以等效為二極管、電壓源及電阻串聯的負載形式。在此基礎上可以將LED負載陣列也可以等效為電壓源與電阻串聯形式,如圖3所示。其中Von為LED的閾值電壓,取值在3.1V-3.4V之間。Rs為LED伏安特性的斜率,取值約為0.77Ω,m為每串LED的個數,n為LED的串數。在本次設計m取14,n取8。
將LED負載陣列折算到整流橋的原邊,其等效電路圖如圖4所示,其中輸入電壓時一個在0和400V之間變化的方波信號,而折算到整流橋輸入側的LED的等效模型為一個在-mVon與mVon之間變化的方波信號和電阻串聯的模型。
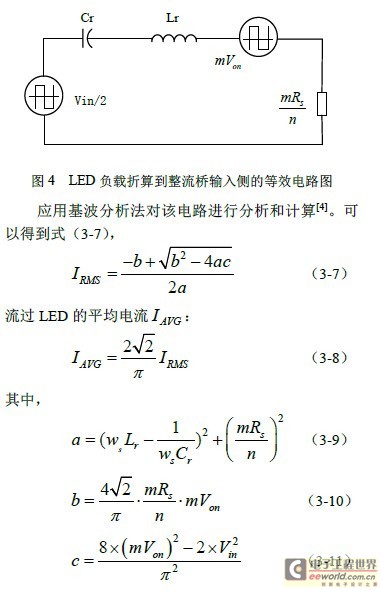
由于諧振電容的值對電路影響較小,取為100nF,為防止音頻的干擾[5],設定開管起始頻率為35kHz,設定LED正常工作時的電流為330mA。經計算可以得到電感值為507uH。
進而可以計算得出不同開路數下,即當n變化時,
對應的不同的開關頻率,如表1所示。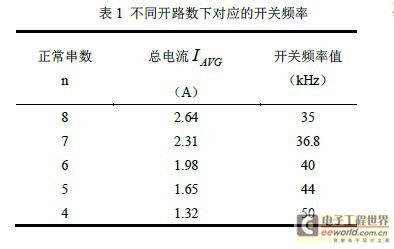
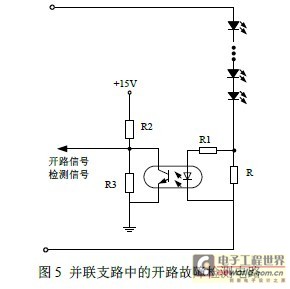
3.3 開路故障檢測電路
圖5為本次設計的開路故障檢測電路的原理圖,采用光耦TLP521作為隔離判斷電路,當次串LED正常工作時,開路信號有送一個低電平信號到控制器的I/O口,當此串LED出現開路故障時,便有一個高電平信號送到控制器的I/O口。控制器通過檢測發生開路的LED串的數目來調節開關頻率,從而調節總電流的閉環值,正常工作的LED串自動均流,保持每串LED的恒流驅動。其中,各個參數的取值為:R=5Ω,R1=27Ω,R2=15KΩ,R3=7.5KΩ。
3.4 短路故障檢測電路
圖6所示的為短路故障檢測電路,即在開關管Q2橋臂上并聯故障電流檢測電阻,當LED負載中出現短路故障時,此時電路中的電流就會迅速增大,若通過檢測電阻檢測到電流超過一定的值時,此時控制器就會將停止對LED負載的驅動,以防止進一步的損壞。
4. 仿真分析
基于以上對系統整體分析和設計,采用Saber仿真軟件對系統建立仿真模型,然后對仿真結果進行仿真分析。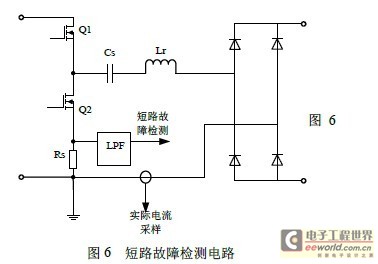
圖7是LED在滿載運行時其兩端的電壓波形及流過LED的電流的波形圖,從圖中可以看出在滿載運行時LED兩端的電壓基本穩定在47V。流過LED的平均電流為2.57A,基本可以滿足系統的要求。
圖8是諧振電流波形及整流橋輸入側的電壓波形,在0.4s時正常工作的LED串數由8串變為4串,從整流橋輸入側電壓的仿真波形中可以看出開關頻率是增加的,隨著開關頻率的增加流經諧振電路的電感電流是減小的。
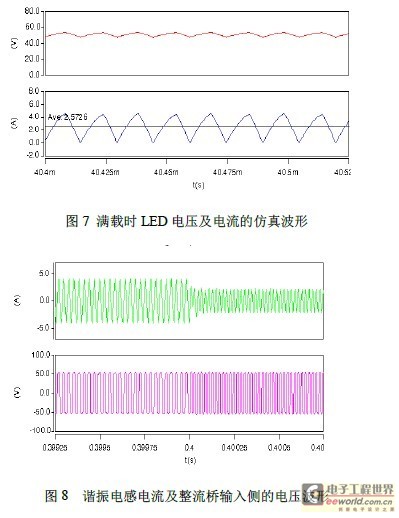
圖9是流過LED負載的總電流動態響應的仿真波形。在0.4s時正常工作的LED串的數目由8串變為4串,從圖中可以看出流過LED的閉環總電流值減小,從而保證流經每串LED的電流是恒定的。圖10是LED負載兩端的電壓波形,可以看出當正常工作的LED串的數目發生變化時,LED負載兩端的電壓基本保持不變。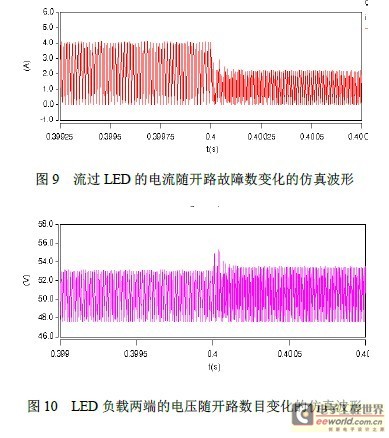
5. 實驗結果分析
根據前面對系統的分析和設計,搭建實驗樣機一臺。樣機實物圖如圖11所示。

圖12為8串LED正常工作時,LED負載兩端的電壓波形及流經LED的總電流波形。圖13是只有4串正常工作時LED負載兩端的電壓波形及流經LED的總電流波形,從圖中可以看出LED兩端的電壓基本不變,LED的總電流變小。
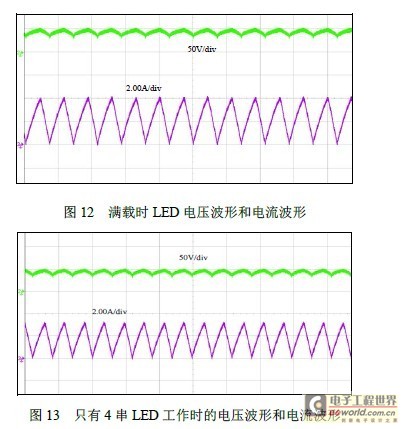
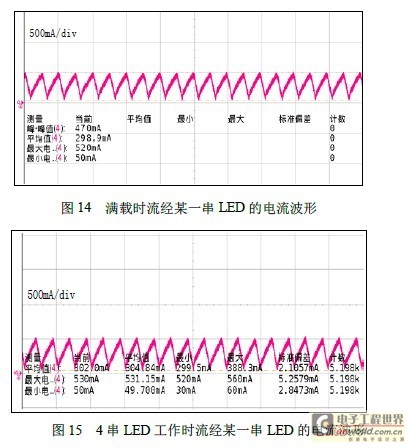
圖14和圖15是當8串LED正常工作時及只有4串LED正常工作時,流過某一串的LED的電流波形,從圖中可以看出雖然LED負載的并聯的支路數不同,但是流過每串的LED的電流值基本是維持在300mA不變,這就說明該驅動電源可以再不用的開路數目下實現LED串的恒流驅動,即實現了開路保護功能。
6. 結論
本文提出了一種可自動檢測開路故障,并且具有短路保護功能的路燈LED驅動電源方案。文中給出了電路參數的設計方法和過程,對控制策略進行了簡要分析。然后對系統進行了仿真,并對仿真結果進行了分析。最后112W搭建實驗樣機一臺。實驗結果表明,在某些并聯支路出現開路的時候,驅動器能夠自動的修正閉環參考值,保證了單串并聯支路的電流的恒定。
參考文獻
[1] Evan Mills. The $230-billion Global Lighting Energy Bill[C]. Proceedings of the 5th International Conference on Energy-Efficient Lighting, France, 2002:1-2.
[2] 鄭文彬. 節能技術應用的回顧與展望[J]. 華東電力,2005,33(6):20-21.
[3] Mineiro Sa, E. Low Cost Self-Oscillating ZVS-CV Driver for Power LEDs[C]. IEEE,Power Electronics Specialists Conference, 2008. PESC:4196 -4201.
[4] 孫明坤,羅全明. 串聯諧振恒流LED驅動電源的分析及設計[J]. 電力電子技術. 2010,44(8):
[5] Xu Dianguo,Zhang Xiangjun, and Liu Huaiyuan. “Study of Digital LED Driving Technology based on Auto-identifying Open Strings in LED Array”. IECON 2011-37th Annual Conference IEEE Industrial Electronics Society, 7-10 Nov. 2011, Page(s): 2964 – 2968.

評論