ZigBee技術智能化控制城市LED路燈系統解析

1.引言
本文引用地址:http://www.104case.com/article/201612/325728.htm道路照明是城市公共設施的重要組成部分,目前國內的道路照明系統大部分沒有采用網絡化監控管理,只能以區域為單位對照明設備進行簡單的開關燈控制,多數城市路燈的開關控制仍由傳統變壓器(配電箱)分散控制,不能對路燈進行有效監控,缺乏靈活多變的操作系統,因此存在著一系列的問題:如系統復雜,難以統一管理;路燈覆蓋面廣,維護困難;開關控制效率低,電能浪費嚴重等。針對目前城市對路燈照明控制和管理水平的不足,筆者設計了一套路燈無線監控系統,能對城市路燈實現智能化控制并有效節約電能。本系統主要分為三層,分別是具有人機交互界面功能的路燈管理中心、匯聚路燈節點信息和發送路燈控制命令的路燈監控子站以及采集路燈節點信息的路燈控制終端。采用GPRS通信和ZigBee無線通信相結合的技術手段,取代了傳統的有線傳輸。其中,路燈管理中心和路燈監控子站之間的通信采用GPRS技術,具有覆蓋范圍廣、傳輸速率高的特點,且能實現遠程異地操作;路燈監控子站和路燈控制終端以及路燈控制終端之間的通信采用ZigBee技術。
2.路燈監控網絡的系統結構
本設計采用GPRS技術與ZigBee技術相結合的方案,結合兩者的優點,既節約成本,又降低了系統的復雜度。系統采用“路燈管理中心一一路燈監控子站一一路燈控制終端”三層模式結構,實現對路燈的遠程控制操作。其中,路燈管理中心與路燈監控子站之間的通信采用GPRS技術,路燈監控子站與路燈控制終端以及路燈控制終端之間的通信采用ZigBee技術。系統操作的對象是城市道路成千上萬盞路燈,通過管理系統,負責監測路燈的各項運行狀況,如監測當前路燈節點的電壓、電流、功率等指標是否符合規范,并且能實現對路燈開關的簡單控制。整個路燈監控系統結構圖如圖1所示。

圖1 系統結構圖
ZigBee網絡拓撲結構可分為三類:網狀結構、星型結構和樹狀結構。經過對ZigBee網絡拓撲結構的分析,考慮到路燈監控覆蓋范圍面廣,所處的自然環境易受天氣、障礙物和電磁輻射等的影響,難免會出現終端節點失效的情況,星形網絡和樹形網絡都不宜采用。因此,本系統采用網狀形ZigBee網絡,它具備較大的通信范圍,能實現路由發現的功能,當網絡出現故障時,能自動修復實現愈合,從而大大提高了整個監控系統的穩定性和可靠性,使用路由功能傳輸。網絡結構如圖2所示。

圖2 ZIGBEE組網意示圖
在一個路燈無線監控系統中,包含有多個ZigBee網絡,一條街道附近區域的路燈就組成一個ZigBee網絡。由于路燈均勻分布于道路兩旁,且每兩盞燈的間距一般為25~30m。所以,本系統首先要選取一個合適的地點安置ZigBee網絡協調器,在ZigBee網絡中,由ZigBee網絡協調器負責建立網絡,通常情況下,用ZigBee網絡協調器實現路燈監控子站的功能,負責維護街道上路路燈節點的運行狀況。路由節點加入到網絡后,路燈監控系統中控制終端的角色。實際應用中,為了方便管理,每一個路燈控制終端只能加入一個ZigBee網絡,實現單燈控制。當所有的路由器節點都成功加入網絡后,協調器根據網狀形網絡拓撲結構為路由節點分配網絡地址。
3.系統硬件設計
3.1 ZigBee協調器模塊設計
ZigBee協調器主要由GPRS通信單元、微處理器、通信單元和電源模塊組成。協調器負責組建ZigBee網絡,實現信息的收發處理工作,需要不斷地采集監控中心發來的各種指令下達給控制終端,同時將終端及線路信息反饋給監控中心。模塊結構圖如圖3所示。處理器使用基于ARM7的微處理器模塊,通過串口TTL電平和GPRS通信模塊進行數據傳遞,通過SPI串口連接通信模塊,電源模塊通過220V交流轉換為5V為處理器、GPRS通信模塊和通信模塊供電。通信模塊采用TI公司的ZigBee射頻芯片cc2530,主要技術指標包括:工作頻段為2.4GHz;信道為16個;發射功率為4.5dBm;接收靈敏度為-97dBm。

圖3 ZigBee協調器模塊
3.2LED路燈控制模塊
在路燈控制終端中,它的硬件組成部分主要包括MCU微控制器單元、電壓電流等信息監測單元、射頻模塊單元、LED路燈驅動控制單元和電源模塊。其硬件結構如圖4所示。作為路燈控制終端設備的CPU,要完成與射頻模塊的通信、數據包收發的處理和存儲等功能,除要求MCU微控制器具有足夠的存儲空間外,還要具有強大的數據處理能力。本文采用意法半導體公司生產的ARM Cortex-M3內核的32位系列單片機,型號為STM32F103RBT6,采用LQFP(輕薄方型扁平式)封裝結構,有64個管腳,外觀大小只有l0mmXl0mm,價格在10元一20元人民幣之間。供電電壓為2-3.6V,一般采用3.3V供電,具有2個12位模數轉換器,支持7通道的DMA控制器。模塊引腳圖如圖5所示。

圖4 LED路燈控制模塊硬件結構
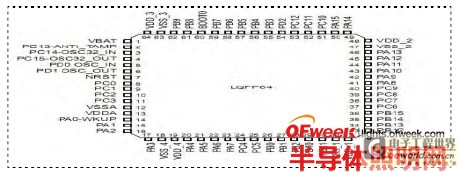
圖5 STM32F103RBT6模塊引腳圖
圖5中,MCU共有三個串口,分別是UART1,UART2和UART3,用來實現和其他模塊之間的通信。管腳42和43作為DART 1串口的發送和接收引腳,與GPRS模塊相連,從而實現CPU和GPRS模塊之間的通信,這種連接方式主要針對監控子站設備,而路燈控制終端設備并不連接GPRS模塊。管腳16和17作為UART2串口的發送和接收引腳,與射頻模塊相連接,從而實現CPU和射頻模塊之間的通信。管腳29和30作為UART3串口的接收和發送引腳,主要實現RS485通信,與LED控制板相連接,從而實現CPU對LED控制板的驅動。MCU的14管腳作為RS485的使能信號,與485轉換芯片相連接,根據接收到的485通信協議,實現對LED驅動控制板作為收發轉換設備的處理。MCU的15管腳輸出PWM信號,調節電流大小,從而實現對LED路燈的亮度調節。MCU的管腳21和22連接至檢測單元的安全門接口,用來實現防盜報警的功能。 4.軟件設計
4.1 系統軟件的總體設計
本文采用MDK作為嵌入式系統開發的編譯環境,支持ARM7架構的Cortex-M3內核處理器,自動配置啟動代碼,集成Flash燒寫模塊、具有強大的Simulation設備模擬、性能分析功能。本系統無線傳感網絡的軟件層分為三個層次:硬件抽象層、系統服務層和應用層。
其中,硬件抽象層移植了COS-Ⅱ嵌入式實時操作系統,為上層屏蔽了硬件細節,同時為硬件單元如電源模塊、MCU微處理器模塊和射頻通信模塊等提供了驅動程序。系統服務層主要實現操作系統的任務調度功能,通過修改OS_CPU_A.S檔,用匯編語言實現CPU的開/關中斷和任務的切換,并且支持傳輸通信協議,完成路由算法的實現。應用層主要根據使用者的定義,實現上位機軟件的設計功能。
本文根據數據流傳輸方向的不同,把數據傳輸分為上報和下發。上報是指路燈控制終端通過射頻模塊發送數據到達路燈監控子站,最終由路燈監控子站通過GPRS傳輸至路燈管理中心;所謂下發是指路燈管理中心發出的命令通過GPRS傳輸至路燈監控子站,再由路燈監控子站發送至需要執行操作命令的路燈控制終端。
如圖6所示為系統主程序流程圖。節點一旦上電,首先完成初始化操作,主要包括MCU控制模塊的通用I/O口、串口、定時器以及射頻模塊的初始化配置等。接著初始化操作系統,當執行操作系統后,系統就進入了一個無限循環狀態,初始化時,為了減少節點的功率損耗,每個節點都進入休眠狀態。當中斷產生時,就觸發了待要執行的任務,這時,CPU會為該任務分配資源,并執行相應的通信服務子程序。例如,協調器收到了來自路燈管理中心發送的命令,代表協調器收到了一個中斷請求,節點從休眠狀態被啟動,執行通信服務子程序,接收來自管理中心下發的數據包,當接收數據完成后,還要對數據進行校驗,如果校驗失敗,則丟棄該幀;否則,還要繼續判斷是否是發送給自己的數據包,如果不是,協調器需要將該數據包轉發出去,接著協調器節點會從接收狀態變成發送狀態,等發送成功后,會產生中斷請求,并再次進入休眠狀態,等待下一次節點狀態的啟動。

圖6 系統主程序流程圖
4.2 路燈監控子站處理信息流程
路燈監控子站不僅要與路燈管理中心建立GPRS網絡,還要與路燈控制終端建立ZigBee網絡,在路燈監控子站節點上,既裝有GPRS通信模塊,又搭載了射頻模塊。當自身設備的MCU初始化完成后,通過串口對GPRS模塊進行初始化,按照GPRS協議接入GPRS網絡,接著進入了主程序循環任務。首先掃描ZigBee網絡通信信道,當ZigBee網絡通信鏈路成功后,依據網絡協議進行數據傳輸。如圖7所示為路燈監控子站主程序流程圖。
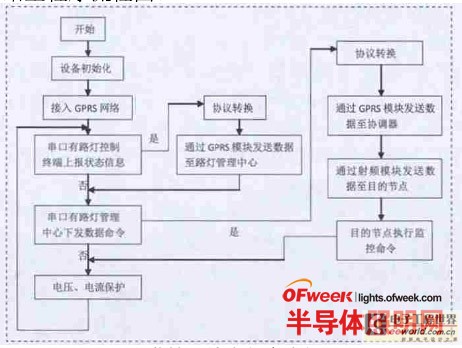
圖7 監控子站主程序流程圖
在圖7中,監控子站初始化完成后,進入了系統主程序的循環任務中,任務循環的主要功能就是監測MCU串口上是否有數據上報和下發。當串口UART 1收到來自路燈管理中心的監控命令后,監控子站經過協議轉換,通過射頻模塊路由至目的節點,目的節點收到監控命令時執行操作。當串口UART2收到來自路燈控制終端上報的節點狀態信息時,監控子站經協議轉換,通過GPRS網絡把數據發送至路燈管理中心,下發監控命令,完成對路燈節點的開/關操

評論