51單片機(jī)驅(qū)動(dòng)步進(jìn)電機(jī)(匯編語(yǔ)言)

這款步進(jìn)電機(jī)的驅(qū)動(dòng)電壓12V,步進(jìn)角為 7.5度 . 一圈 360 度 , 需要 48 個(gè)脈沖完成!!!
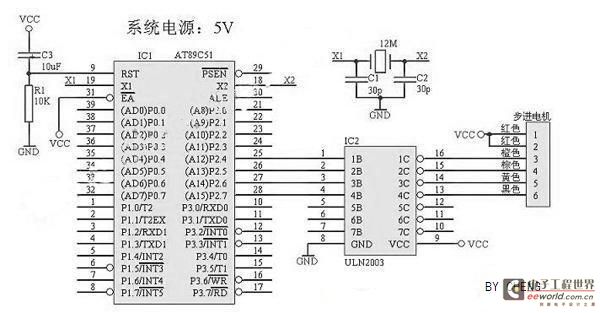
該步進(jìn)電機(jī)有6根引線,排列次序如下:1:紅色、2:紅色、3:橙色、4:棕色、5:$、6:黑色。
采用51驅(qū)動(dòng)ULN2003的方法進(jìn)行驅(qū)動(dòng)。
ULN2003的驅(qū)動(dòng)直接用單片機(jī)系統(tǒng)的5V電壓,可能力矩不是很大,大家可自行加大驅(qū)動(dòng)電壓到12V。
;******************************************************************
;****************************步進(jìn)電機(jī)的驅(qū)動(dòng)***************************************
; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19
;---------------------------------------------------------------------------------
; 步進(jìn)電機(jī)的驅(qū)動(dòng)信號(hào)必須為 脈沖信號(hào)!!! 轉(zhuǎn)動(dòng)的速度和脈沖的頻率成正比!!!
; 本步進(jìn)電機(jī)步進(jìn)角為 7.5度 . 一圈 360 度 , 需要 48 個(gè)脈沖完成!!!
;---------------------------------------------------------------------------------
; A組線圈對(duì)應(yīng) P2.4
; B組線圈對(duì)應(yīng) P2.5
; C組線圈對(duì)應(yīng) P2.6
; D組線圈對(duì)應(yīng) P2.7
; 正轉(zhuǎn)次序: AB組--BC組--CD組--DA組 (即一個(gè)脈沖,正轉(zhuǎn) 7.5 度)
;----------------------------------------------------------------------------------
;----------------------------正轉(zhuǎn)--------------------------
ORG 0000H
LJMP MAIN
ORG 0100H
MAIN:
MOV R3,#144 正轉(zhuǎn) 3 圈共 144 脈沖
START:
MOV R0,#00H
START1:
MOV P2,#00H
MOV A,R0
MOV DPTR,#TABLE
MOVC A,@A+DPTR
JZ START 對(duì) A 的判斷,當(dāng) A = 0 時(shí)則轉(zhuǎn)到 START
MOV P2,A
LCALL DELAY
INC R0
DJNZ R3,START1
MOV P2,#00H
LCALL DELAY1
;-----------------------------反轉(zhuǎn)------------------------
MOV R3,#144 反轉(zhuǎn)一圈共 144 個(gè)脈沖
START2:
MOV P2,#00H
MOV R0,#05
START3:
MOV A,R0
MOV DPTR,#TABLE
MOVC A,@A+DPTR
JZ START2
MOV P2,A
CALL DELAY
INC R0
DJNZ R3,START3
MOV P2,#00H
LCALL DELAY1
LJMP MAIN
DELAY: MOV R7,#40 步進(jìn)電機(jī)的轉(zhuǎn)速
M3: MOV R6,#248
DJNZ R6,$
DJNZ R7,M3
RET
DELAY1: MOV R4,#20 2S 延時(shí)子程序
DEL2: MOV R3,#200
DEL3: MOV R2,#250
DJNZ R2,$
DJNZ R3,DEL3
DJNZ R4,DEL2
RET
TABLE:
DB 30H,60H,0C0H,90H 正轉(zhuǎn)表
DB 00 正轉(zhuǎn)結(jié)束
DB 30H,90H,0C0H,60H 反轉(zhuǎn)表
DB 00 反轉(zhuǎn)結(jié)束

評(píng)論