機器人教程3:直流電機驅動及L298N模塊

這一節我們主要介紹H橋電路,后面的章節我們會專門介紹到PWM調速問題。
3、H橋電路
電機做好后后引出兩個極,如圖5所示,給兩個極能電就能夠實現其轉動,而改變其電源極性剛可以實現換向。

圖5減速電機及電路圖
前面我們說過必須要解決驅動力不足和換向問題,設計一般會采用兩種方法,一是設計由分離元件組成的驅動電路實現,另一種方法則是采用專用的驅動芯片加以實現。由于專用的驅動芯片由于結構簡單、價格便宜、可靠性高等特點,因而被廣泛的應用實現電機的驅動。電機的驅動芯片很多如L298N、BST7970、MC33886等,這里我們介紹智能機器人中比較常用的LM298N驅動模塊,BST7970、MC33886一般在電機功率比較大的場合適用。在介紹LM298N驅動模塊之前,我們先介紹一下H橋電路,需要說明的是時,在下面的電路由于內部采用了三極管,三極管本身起到放大的作用,即增大了驅動電流,所以在下面的講解中我們主要側重講解如何實現換向功能。
H橋電路可以用如圖6來表示其原理:
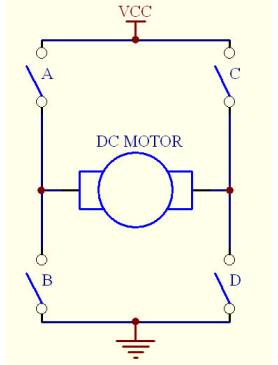
圖6 H橋簡單電路
從圖中可以看出,其形狀類似于字母“H”,作為負載的直流電機像“橋”一樣架在上面,所以稱為“H橋驅動”,4個開關所在的位置就稱為“橋臂”。
從圖中可以看出,假設開關A、D接通,電機正向轉動,而開關B、C接通時,直流電機將反向轉動,從而實現了電機的正反控制。當然實際應用中我們還可以得到其它兩種狀態:
1)剎車,即將A、C或B、D接通,則電機慣性轉動產生的電動勢將被短路,形成阻礙運動的感應電流,開成“剎車”作用。
2)惰行,4個開關全部斷開,則電機慣性所產生的電動勢將無法開成電路,從而也就不會產生阻礙運動的感應電流,電機將慣性轉動較長時間。
以上電路只是說明的原理,實際電路中我們通常將來四個開關換成三極管。如圖7所示,H橋式電機驅動電路包括4個三極管和一個電機。要使電機運轉,必須導通對角線上的一對三極管。根據不同三極管對的導通情況,電流可能會從左至右或從右至左流過電機,從而控制電機的轉向。由于H橋電路可以很方便的實現電機的正反轉的驅動因而得到了廣泛應用。
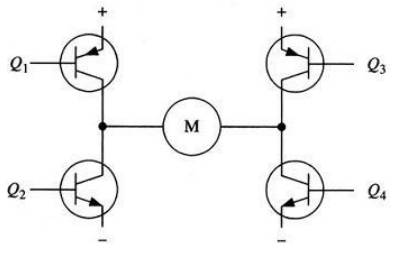
圖7典型的H橋電路
要使電機運轉,必須使對角線上的一對三極管導通。例如,如圖圖8所示,當Q1管和Q4管導通時,電流就從電源正極經Q1從左至右穿過電機,然后再經Q4回到電源負極。按圖中電流箭頭所示,該流向的電流將驅動電機順時針轉動。當三極管Q1和Q4導通時,電流將從左至右流過電機,從而驅動電機按特定的方向轉動。
圖9所示為另一對三極管Q2和Q3導通的情況,電流從右至左流過電機。當三極管Q2和Q3導通時,電流將從右至左流過電機,從而驅動電機沿另一方向轉動。
這里需要注意的是,電機一般會引出兩個極,但并無正負之分,所謂的正反轉也只是我們人為定義,具體要看實際的應用和安裝情況。
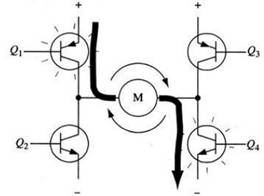
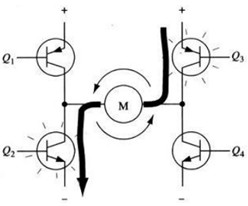
圖8電機正轉圖9電機反轉
驅動電機時,保證H橋上兩個同側的三極管不會同時導通非常重要,如果三極管Q1和Q2同時導通,那么電流就會從正極穿過兩個三極管直接回到負極,此時電路中除了三極管外沒有其它任何負載,因此電路上的電流就可能達到最大值(該電流僅受電源性能限制),甚至燒壞三極管。基于上述原因,在實際驅動電路中通常要用硬件電路方便地控制三極管的開關。
圖10所示就是基于這種考慮的改進電路,它在基本的H橋電路的基礎上增加了4個與門和2個非門。4個與門同一個使能導通信號相接,這樣,用這一個信號就能控制整個電路的開關。而2個非門通過提供一種方向輸入,可以保證任何時候在H橋的同側都只有一個三極管導通。
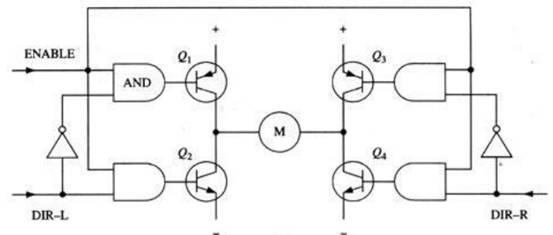
圖10改進后的H橋驅動電路
采用以上方法,電機的運轉只需要三個信號控制,如圖11:兩個方向信號和一個使能信號。如果DIR-L信號為0,DIR-R信號為1,并且使能信號是1,那么三極管Q1和Q4導通,電流從左至右流經電機,如圖6所示;如果DIR-L信號變為1,而DIR-R信號變為0。那么Q2和Q3將導通,電流則反向流過電機。
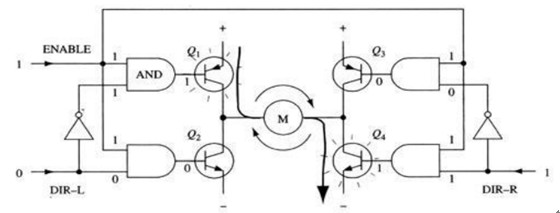
圖11驅動電機轉動時的信號示意圖
4、驅動芯片選擇時考慮的問題
H橋電路雖然有著許多的優點,但是在實際的制作過程中,由于元件較多,電路和搭建也較為麻煩,增加了硬件設計的復雜度。所絕大多數制作中通常直接選用專用的驅動芯片。目前市面上專用的驅動芯片很多,如上面提到的L298N、BST7970、MC33886等,但到底我們應該選用哪咱芯片呢,當然每種芯片有自己的優勢,我們應該根據設計需要從價格和性能上綜合考慮才行,這里談三個方面。

評論