基于CAN總線的并聯液壓混合動力車控制系統

采用分布式控制方式,可以將主機從繁瑣的邏輯控制過程中解放出來,對于主機的小型化、產品化有重要作用。
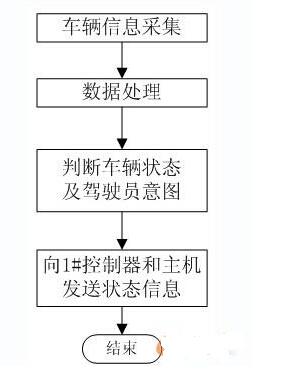
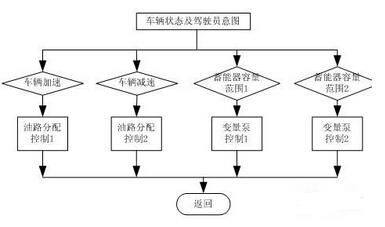
圖5 3#控制器軟件流程
4 系統的可靠性設計
硬件可靠性方面的工作很多,主要有以下兩點:
(1)雙時限看門狗:系統的每個節點控制器均采用了雙時限看門狗電路。雙時限看門狗有兩個定時器:一個為短定時器(用單片機P80C592內帶的),一個為長定時器(外部看門狗定時器MAX705)。短定時器定時為T1,長定時器定時為T2,0
這樣,當程序進入某個死循環,如果這個死循環包含短定時器FeedDog語句而不包含長定時器FeedDog語句,那么長定時器終將溢出,使單片機復位。巧妙安排長定時器FeedDog語句的位置,可保證出現死機的概率極低。
(2)CAN總線系統的抗干擾性:為了增強CAN 總線節點的抗干擾能力,P80C592的CTX0和CRX0并不直接與82C250的TXD和RXD相連,而設計為是通過高速光耦6N137后與82C250相連這樣就很好的實現了總線上各CAN 節點間的電氣隔離。應該特別說明的一點是,光耦部分電路所采用的兩個電源是完全隔離的,否則采用光耦也就失去了意義。電源的完全隔離采用的是兩個小功率DC/DC電源隔離模塊。實現這些部分雖然增加了節點的復雜和成本,但是卻提高了節點的穩定性和安全性。
82C250與CAN總線的接口部分也采用了一定的安全和抗干擾措施。82C250的CANH和CANL引腳各自通過一個5Ω的電阻與CAN總線相連,電阻可起到一定的限流作用保護82C250免受過流的沖擊。CANH和CANL與地之間并聯了兩個30P的小電容,可以起到濾除總線上的高頻干擾和一定的防電磁輻射的能力。
另外,每個節點控制器還配置了電源指示燈,總線數據收發指示燈,可在一定程度上讓用戶了解控制器的狀況。
軟件可靠性設計中,在各節點控制器程序中,每處需要等待的程序分支都設置了定時器。當規定時間內運行條件仍不能滿足,控制器將取消當前任務,并向主機報警
5 結論
本文的創新點在于設計了采用CAN總線網絡結構的液壓混合動力車控制系統,構建了基于CAN總線的分布式電動車控制系統硬件平臺,確定了系統的網絡協議,并根據所提出的分布式結構設計了控制軟件,最后對系統軟硬件可靠性進行了設計。
根據本文所設計的串聯式混合動力電動車控制系統已經在試驗臺上進行了試運行,并完成了各種功能測試。經試驗證明,該控制系統性能穩定,工作可靠,對緊急指令的響應速度快,并能對歷史數據進行保存,能夠很好的滿足液壓混合動力車的運行需求。

評論