基于ARM9的高精度生化分析儀溫度控制系統設計

2.3 溫度采集單元的實現
溫度采集單元主要溫度信號的實時采樣并響應主機的命令[31。本系統溫度傳感器使用DS1 8B20,DS1 8B28B20是美國半導體DALLAS公司推出的單總線溫度傳感器。該器件具有體積小、結構簡單、實用電壓寬、可組網、成本低廉、便于總線擴展和維護等諸多優點,而且內有控制電路,收發電路和存儲電路等。DS18B20 具有較寬的電壓適用范圍(3~5.5V),并能夠通過編程實現溫度信號的9~12位的數字轉換,分辨率最高可以達到0.0625℃。其測量溫度范圍為-55~+125℃,其中,在-10~+85℃范圍內,精度能夠達到±0.5℃。由于DS1 8B20是通過一條數據線傳輸數據, 這樣整個系統要嚴格按該器件單總線協議規定的時序進行工作, 所以DS 1 8B20有嚴格的通信協議來保證各個數據傳輸的正確性和完整性。根據DS 1 8B20的通訊協議,主機控制DS 1 8B20完成溫度轉換時,首先在每一次讀寫之前對DS1 8B20進行復位,復位成功后發送一條ROM指令,然后發送RAM 指令,這樣才能對DS18B20進行預定的操作。R O M 操作命令主要是對傳感器地址的操作。RAM 指令主要完成溫度的測量,主要有讀寄存器,寫寄存器,溫度轉換等操作。
2.4 鍵盤及LCD顯示單元
系統采用SPI接口的鍵盤控制芯片ZLG 72 8與$3C2410A的SPI接口連接,ZLG7289掃描的行線R[2:0】和列線C[7:0】構成矩陣鍵盤,同時在芯片內部可自動完成掃描、譯碼、去抖動處理等任務。
SPI(Serial Peripheral Interface--串行外設接口)總線系統是一種同步串行外設接口,它可以使MCU與各種外圍設備以串行方式進行通信以交換信息。SPI有三個寄存器分別為:控制寄存器SPCR,狀態寄存器SPSR,數據寄存器SPDR。外圍設置FLASHRAM、網絡控制器、LCD顯示驅動器、A/D轉換器和MCU等。SPI總線系統可直接與各個廠家生產的多種標準外圍器件直接接口,該接口一般使用4條線:串行時鐘線(SCLK)、主機輸入/從機輸出數據線MISO、主機輸出/從機輸入數據線MOSI和低電平有效的從機選擇線SS(有的SPI接口芯片帶有中斷信號線INT、有的SPI接口芯片沒有主機輸出/從機輸入數據線MOSI)。
SPI接口的全稱是"Serial Peripheral Interface",意為串行外圍接口,是Motorola首先在其MC68HCXX系列處理器上定義的。SPI接口主要應用在EEPROM,FLASH,實時時鐘,AD轉換器,還有數字信號處理器和數字信號解碼器之間。
SPI接口是在CPU和外圍低速器件之間進行同步串行數據傳輸,在主器件的移位脈沖下,數據按位傳輸,高位在前,低位在后,為全雙工通信,數據傳輸速度總體來說比I2C總線要快,速度可達到幾Mbps。
S3C2410A內部已經集成了LCD 控制器,因此可以很方便地控制各種類型的LCD屏,例如:STN和TFT屏。系統采用Samsung 3.5 反射型TFT液晶LTS350Q1,320 X 240像素,256k色,White LED背光,自帶四線式觸摸屏,可以直接和S3C2410A的觸摸屏驅動電路連接,觸摸位置直接用CPU內置的ADC電路采樣可得。
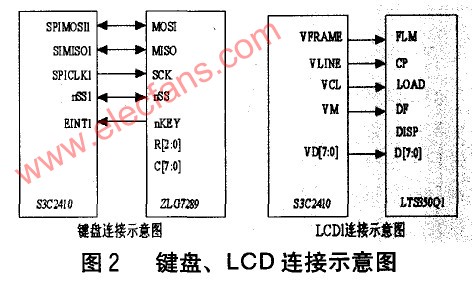
鍵盤和LCD連接示意圖如圖2所示。
3 模糊自整定PID控制算法模塊設計
模糊自整定PID控制系統能在控制過程中對不確定的條件、參數、延遲和干擾等因素進行檢測分析,采用模糊推理的方法實現PID三個參數 、 f和 的在線自整定。模糊自整定PID控制不僅保持了常規PID控制系統的原理簡單、使用方便、魯棒性較強等特點,而且具有更大的靈活性、適應性、精確性等特性。
模糊自整定PID控制器是在常規PID控制器的基礎上建立參數K ,K ,K 與偏差絕對值IE I和偏差變化率
絕對值lecI問的二元連續函數關系的控制器。二元函數關系為 ]: = ( ,J j), = 0 ,J ),K = ( JEc})。模糊自整定PID控制器根據不同的 、IEcI在線自整定K, K 和Kd。
取輸入偏差、偏差變化率和輸出隸屬度函數分別如圖3所示。
對于圖3中 的隸屬度,當n=p時,a,b分別取一0.3,0.3;當n=i時,a,b分別取一0.06,0.06;當n=d時,a,b分別取一3,3。
模糊一PID控制系統為雙輸人三輸出系統,輸入量為偏差E和偏差變化率EC,輸出量為PID參數 ,K 和 。采用七種不同的模糊語言變量進行描述:負小(NS)、負中(NM)、負3v(NB)、零(Z)、正小(Ps)、正中(PM)、正大(PB),控制規則取為:if E and EC then K ,K, ,根據PID控制的基本原理,結合實際經驗,設計模糊控制表如表1所示。
4 系統軟件設計
軟件部分采用嵌入式Linux操作系統,系統主要流程如圖4所示。系統上電啟動BootLoader,初始化系統硬件,加載操作系統,將系統帶人一個合適的環境。完成系統引導加載后新建一系列線程,包括溫度數據采集線程、模糊自整定控制算法線程、輸出線程,并且新建線程之間的通信管道FIFO。可通過鍵盤并利用外部中斷來控制是否停止采樣,如果停止采樣則合并線程,結束應用程序。
采用重心法對經模糊控制規則表所得的 、 和進行反模糊化處理得到精確的值,再將這些值代入如下公式
5 結束語
本系統選用高性能ARM9系列處理器S3C2420以及嵌入式Linux操作系統,溫度傳感器采用基于目前最流行的單總線溫度傳感器DS 1 8B20,設計并實現了生化分析儀中的一種高精度溫度控制器。結果證明,該系統能很好地實現對生化分析儀反應池的溫度控制在需要范圍內,從而有效地提高了生化分析儀的檢測精度和準確度。
參考文獻:
[1].S3C2410Adatasheethttp://www.dzsc.com/datasheet/S3C2410A_589565.html.
[2].ARM920Tdatasheethttp://www.dzsc.com/datasheet/ARM920T_139814.html.
[3].Devicedatasheethttp://www.dzsc.com/datasheet/Device_1397784.html.
[4].DS18B20 datasheethttp://www.dzsc.com/datasheet/DS18B20+_819975.html.
[5].ROMdatasheethttp://www.dzsc.com/datasheet/ROM_1188413.html.
[6].ZLG7289datasheethttp://www.dzsc.com/datasheet/ZLG7289_1134608.html.

評論