基于電磁感應的多層管柱電磁探傷測井系統

電橋的負載為發射線圈。我們小組通過查閱資料,以文獻指標為參考,采用0.6mm漆包線,將發射線圈和接收線圈密繞在同一根空心塑膠管上,實物如圖 12所示:

圖 12 自制發射線圈實物圖
經測量,發射線圈和接收線圈的指標為:D=2.6cm,L=0.31mH,R=2.7Ω。 發射機電路連接如圖 13所示,其中負載為發射線圈。
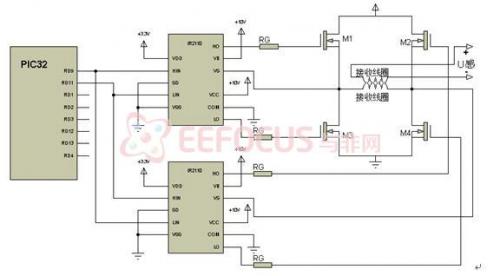
圖 13 發射機電路原理圖
IRS2110的輸入與PIC32單片機的RD9,RD11兩腳相連。通過RD9和RD11電平的交替變化,時序如圖7所示,就可以產生交替變化的柵壓,進而控制MOSFET開關的開啟,在發射線圈兩端產生雙極性脈沖。
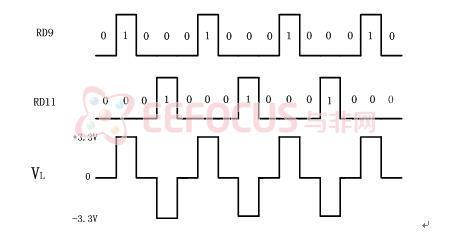
圖 14 發射機模塊時序圖
然而,在實際應用中,電流脈沖總存在一定的上升延遲和下降延遲,使電流達到穩態的時間變長,尤其是當下降沿陡度不夠時,接收線圈對二次場的感應受到一次場的干擾;除此之外,電流脈沖呈線性下降,能夠在油管中產生穩定的感生電流。
故對發射線圈電流脈沖要求:上升沿盡量陡,下降沿陡且線性度好。
衰減曲線的模擬及模型解釋
鑒于比賽的時間緊迫和缺少不同損傷類型油井管道等硬件條件,我們小組經過討論,決定用可變電阻和瓷片電容并聯充放電地形式來模擬接收線圈中的指數衰減曲線,電路如下圖所示:
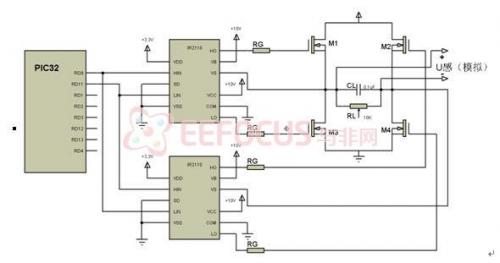
圖 15 衰減曲線模擬電路
模擬的衰減曲線衰減速率與可變電阻的阻值有關。根據前述衰減速度同管壁損傷的關系和
電容充放電公式: 和
和 ,當滑動變阻器的阻值變小時,模擬的是管壁較薄(有損傷)的情況;當滑動變阻器的阻值增大時,模擬的是管壁較厚(無損傷)的情況。
,當滑動變阻器的阻值變小時,模擬的是管壁較薄(有損傷)的情況;當滑動變阻器的阻值增大時,模擬的是管壁較厚(無損傷)的情況。
接收機模塊
接收機模塊由接收線圈,前置放大電路,可編程放大電路以及模數轉換器組成。其中,接收線圈如前文所述,和發射線圈密繞在同一根空心塑膠管上。
前置放大電路
在瞬變電磁法套管檢測中,信號源是不接地的接受線圈,感應的電壓信號衰變同指數曲線的形態相似,幅度的變化范圍很大,且在時間上早、中、晚期的衰變速度相差相當大。信號的頻帶寬度較小,頻譜能量主要集中在低頻部分。就信號的動態范圍考慮,前置放大電路的放大倍數應該很小,信號中、晚期屬弱信號,必須考慮放大器的性能:信號的頻帶寬度要求放大器是低頻放大。為了提高瞬變電磁信號數據采集的精度,減少系統的噪聲,可以從兩個方面著手,一方面是盡量減少前置放大電路的噪聲系數,因為前級放大對噪聲的影響最大;另一方面必須考慮信號源阻抗與前置放大電路源阻抗的匹配,以提高額定功率的增益。此外,放大電路輸入阻抗應使接收線圈處于臨界阻尼狀態的匹配。按照以上要求,根據瞬變電磁信號的特點,選擇多運放組合的測量放大器作為前置放大電路是較適合的。測量放大器具有很高的共模抑制比,可抑制各種共模干擾引入的誤差。
瞬變電磁法套管檢測系統的前置放大電路如圖 16所示,選擇普通放大器集成芯片OP07來設計通用的測量放大器,三運放組成的測量放大器如圖中所示。
上面設計的三運放組合式測量放大器由兩級構成,第一級為對稱的同相放大器,第二級為差動放大器。
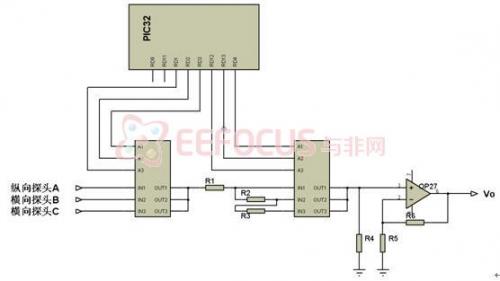
圖 16 前置放大電路
為了提高電路的抗共模干擾能力和抑制漂移的能力,設置測量放大器上下對稱,根據虛短虛斷,可以推出測量放大器閉環增益為:
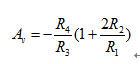
由上式可知,通過調節電阻R1,可以很方便的改變測量放大器的閉環增益。
可變增益放大電路
在瞬變電磁法套管檢測系統中,欲測量的二次場信號的基本特點就是信號弱,且動態范圍較大,而且要對三路磁探頭信號進行分時處理。為了滿足瞬變電磁信號動態范圍大、信號弱,以及要對三路磁信號測量的要求,在電路設計中采用前置放大電路后通過四路單刀單擲開關接可變增益放大電路的方法,在不同的時期對三路磁信號進行分時測量,由PIC單片機控制不同的放大倍數,這樣可以減小信號的動態范圍,從而使三個磁探頭的信號均能實現有效的檢測。可變增益放大電路的原理圖如圖3.8所示,它是由放大器集成芯片OP27和四路單刀單擲模擬開關H1201相配合構成的,OP27具有噪音低、線性好、穩定性高的特點,對于磁探頭信號能實現精確的放大。
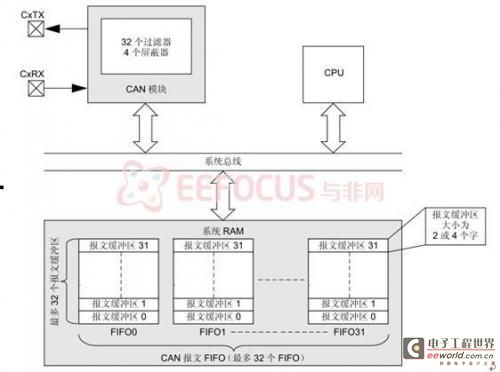
圖 17 可變增益放大電路
由于縱向探頭A是主探頭,其作用最為重要;橫向探頭B,C為輔助探頭,協助縱向探頭A工作,在同一個時期對三路探頭進行分時處理時,采樣順序定為A,A,A,B,C,A,A,A,B,C…這是由PIC32的RD1,RD2,RD3三個引腳控制的。
不同時期信號的放大倍數是由PIC32的RD12,RD13,RD4三個引腳控制的:
RD12有效,早期增益
RD13有效,中期增益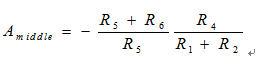
RD4有效,晚期增益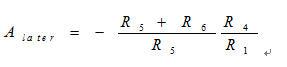
通過調節 的阻值,即能改變放大倍數。
的阻值,即能改變放大倍數。
模數轉換芯片的選擇
將可變增益放大電路輸出的信號送入模數轉換器,即完成了對接收線圈信號的采集。根據電磁法管柱探傷的特點,模數轉換器應具有如下特點:
- 較高的采樣速率。根據香農采樣定律,只有當采樣頻率不小于采集信號頻譜最高頻率的2倍,才能不失真地還原出采樣信號。瞬變電磁方法實際上是寬頻的電磁系統,在理論上,其頻譜可以無限延伸,其中包括了頻域電磁方法的整個頻帶(幾Hz—幾kHz)。因此,模數轉換器的最高采樣頻率最少為10kHz。
- 支持雙極性采樣。由于激勵信號時雙極性脈沖,所以接收線圈產生的信號也應是雙極性的。
- 較高的采樣精度。由于采樣信號具有動態范圍大的特點(幾V—幾十uV),在采樣后期,經過放大的信號幅值仍然很小,這就需要較高的采樣精度,模數轉換器的轉換位數應不小于12Bits。
綜合以上各方面考慮,我們選用了ADI公司的14Bits模數轉換器AD7894。其采樣速率可達到160ksps以上,輸入范圍為-10V — +10V,1LSB僅為1.22mV,且為單電壓供電,使用簡單。
主要參數的計算
接收機模塊的主要參數包括:前放增益;前,中,后三個時期的劃分和增益;采樣時隙和點數確定。
設計參數時要遵守以下三點:1. 信號放大后不能超過模數轉換器的動態范圍-10V--+10V,控制采樣的放大倍數 ;1. 為了保證采樣的精確性,要合理地劃分時期 ;3. 前期衰減快,時隙應較小;后期衰減慢,時隙應較大。經過實驗和計算,我們確定以上參數為:前放增益:2,前期增益:2,中期增益5.5,后期增益11。
前期:2ms—11ms A探頭采樣6*3個點,B探頭采樣6個點,C探頭采樣6個點。采樣時隙 300us。
中期:11ms—45ms A探頭采樣12*3個點,B探頭采樣12個點,C探頭采樣12個點。采樣時隙 400us。
后期:45ms—110ms A探頭采樣30*3個點,B探頭采樣30個點,C探頭采樣30個點。采樣時隙 500us。
通信模塊設計
油井、氣井的一般深度為 3km 左右,有的甚至深達 5km。對于一般的傳輸方法都不能滿足如此大距離的有效傳輸。CAN-bus協議是一種通用的串行通訊標準,在實際場合中有許多的應用,比如:汽車、煤礦、油田、艦船、電力、生產線等。其具有通信速率高、開放性好、報文短、糾錯能力強以及控制簡單、擴展能力強、系統成本低等特點。CAN總線短距離通信中的數據傳輸率最高可達到10Mbps,遠距離通信可以達到10km。本系統采用CAN總線實現井上和井下的通信,在中間加入數個CAN中繼器后,可以以50kbps的波特率穩定的通信。
PIC32MX CAN模塊介紹
PIC32MX795F512L單片機提供有控制器局域網(Controller Area Network,CAN)模塊,CAN模塊實現了CAN2.0B協議,該協議主要用于工業和汽車應用。該異步串行數據通信協議能在電氣噪聲環境下提供可靠的通信。PIC32MX器件系列可以集成了兩個CAN模塊。
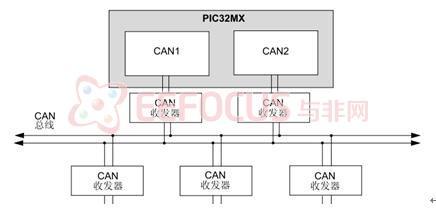
圖 18 PIC32MX CAN 模塊框圖
圖 18是PIC32MX CAN 模塊框圖。CAN模塊有32個報文FIFO,每個FIFO最多可包含32個報文,總共可包含1024個報文,32 個用于報文過濾的接收過濾器,4個用于報文過濾的接收過濾器屏蔽器寄存器,能夠自動響應遠程發送請求。并且提供環回、監聽所有報文和監聽模式,用于自檢、系統診斷和總線監視;低功耗工作模式;專用的時間標記定時器等特性。PIC32MX7系列強大的CAN模塊能夠快捷地實現系統的通信部分功能。
CAN總線電路
圖 19為給出了典型 CAN 總線拓撲的圖示。
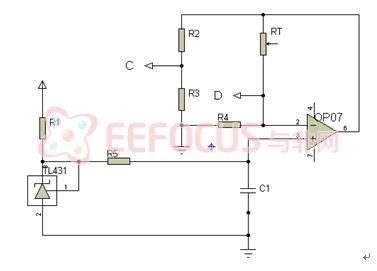
圖 19 典型的 CAN 總線網絡
CAN收發器我們選擇通用 CAN 隔離收發器CTM8251AT,CTM8251AT是一款帶隔離的通用CAN收發器芯片,該芯片內部集成了所有必需的CAN隔離及CAN收、發器件,這些都被集成在不到3平方厘米的芯片上。該芯片特別適合+3.3V系統的CAN控制器,實現CAN節點的收發與隔離功能。CTM8251A接口芯片可以實現帶隔離的CAN收發電路,隔離電壓可以達到DC2500V,可以取代在以往的設計方案中需要光耦、DC-DC電源隔離、CAN收發器等其他元器件才能實現帶隔離的CAN收發電路,其接口簡單,使用方便。
圖 20 CAN總線模塊電路
圖20是本系統中CAN總線模塊的電路。其中C1RX和C1TX接PIC32MX795F512L單片機的CAN1模塊接收和發送管腳(87、88管腳)。CGND為收發器地,FGND為屏蔽線地,FGND接電纜屏蔽線。
CTM8251AT與CAN總線的接口部分也采取了一定的安全和抗干擾措施。CTM8251AT的CANH和CANL引腳各通過一個5.1Ω的電阻和CAN總線相連,電阻可以起到一定的限流的作用,保護CTM8251AT免受過流的沖擊。由于是遠距離,所以終端的一對電阻(RT1)是必要加的,電阻值隨著通訊距離的增加應進行適當的增加,在2km通信距離以內一般設為120Ω。

評論