基于STM32和CAN總線的印染機同步控制系統設計


2 系統工作原理
系統的工作原理主要包括4部分:系統的工作前的調節,系統的啟動,工作中的時時同步調節以及對故障的處理。
(1)在系統工作前,因為印染設備的各電機單元機械部分屬性不可能都相同,所以要在傳送布匹前調節各個部分的運轉同步系數Li使其沒有負載時線速度一樣。在這里一般設置第1個單元控制器的第1個電機單元為主令單元,其他的為從動單元。需要調節個從動電機單元的運轉速度與主動單元的線速度一致。這個系數Li設置后就在以后的運行中固定下來。
(2)系統的啟動是由主控制器先向各單元控制器發出控制命令,包括設置布速V,以及達到布速v的上升時間間隔,然后主控制器給出總的啟動命令,單元控制器根據主控制器的命令設置對應的8路信號輸出,從而控制各電機單元按照預先的設置的上升時間間隔運轉至設定的轉速。
(3)系統工作中的調節,根據印染聯合機的實際工作中,當當電機轉速增加時,會改變張力傳感器的測量數據。根據公式:
Vout=V0Li+KiFi (1)
式中:Vout為D/A轉化的輸出電壓;Li為系統啟動前設置的運轉同步系數;V0為主動電機單元的D/A輸出電壓;Fi為張力傳感器的輸出;Ki為VOUT輸出對張力傳感器輸出反饋Fi的靈敏性。通過輸出反饋Fi,在電機的控制端組成了一個小的閉環系統。張力傳感器示意圖如圖4所示。
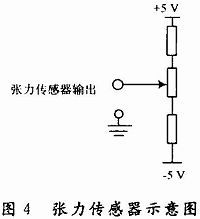
張力傳感器反饋調節同步的基本原理:在正常狀態,傳感器的觸點停在中間狀態,這是傳感器的輸出電壓為零,當電機轉速加快,造成布匹的張力變大時,會造成張力傳感器的觸點向下移動,這是傳感器的輸出會變為負值,這是根據式(1),Vout的值會減小,也就減慢了相應電機的轉速。這樣就可以達到同步的目的。
(4)對故障的處理:在實際的工業生產過程中,不能絕對保證系統會毫無故障的運行,根據以往的印染聯合機的生產經驗,張力傳感器是里面可能會出故障部分,所以根據實際情況,在設計了張力傳感器的共享機制,以及電機輸出通道的自由配置功能,如果張力傳感器Fi不能夠正常工作,也就是說它所對應輸出(Vout),沒有輸出調節功能。這時單元控制器會把他相鄰的電機控制電壓(Vout)i-1輸出到(Vout)i。本文引用地址:http://www.104case.com/article/201611/323191.htm
3 系統主要部分的的軟件設計
軟件設計采用模塊化的軟件設計思想,主要實現以下幾個模塊:主機人機交換界面,系統運行監控模塊,各單元控制器CAN總線通信模塊,傳感器數據采集模塊,單元控制器電機控制調節模塊,故障分析判斷處理模塊以及運行數據保存模塊。其中CAN總線通信模塊,以及各模塊間的協調是難點。
3.1 CAN總線通信模塊設計
CAN總線通信模塊的主要作用是傳輸主控制器發出的控制命令,以及各單元控制器上傳各自的狀態數據。CAN節點收到數據后對數據進行解析,得到相應的命令與數據。
CAN總線節點的軟件設計主要包括3部分:CAN節點初始化、報文發送和報文接收。初始化程序設計對于CAN總線節點的正常工作相當重要。它主要包括工作方式、時鐘輸出寄存器、接收屏蔽寄存器、接收代碼寄存器、總線定時器、輸出控制寄存器和中斷允許寄存器的設置。
3.2 系統各軟件模塊間的工作協調
(1)主控制器通過把控制命令發送到CAN總線上面,相應節點接收并提取相應的命令,按照命令進行相應的操作。
(2)各單元控制器循環采集各張力傳感器的數據,根據數據時時調整相應電機的工作狀態。
(3)各單元控制器每隔一定時間把各自下屬的8個電機狀態通過CAN總線發送給主控制器,主控制器提取里面的狀態信息,記錄各節點的狀態信息,并顯示在人機界面上面。
(4)人們可以根據具體的情況設置各個電機的工作狀態。
4 結語
從系統的原理設計可以看出,這種印染聯合機設計,采用主頻為72 MHz的處理器,可以把數據的處理在各單元控制器上面完成。采用由張力傳感器組成的最小反饋調節系統,保證了系統的時時同步。改變了把狀態信息傳遞各總控制器后,由總控制器實施同步的大循環反饋方式。另外,這種設計采用了集成度比較高的MCU,有12位的A/D,D/A轉換通道,這樣系統就沒有外圍采樣電路,避免了工廠復雜環境對系統的影響。
總之,這種印染聯合機的設計實現了現有高性能處理器與先進的CAN總線控制網絡的結合,并且硬件設計簡單,抗干擾能力強,軟件模塊化設計。系統采用小的反饋回路,一方面減少了總線上面的數據流量,另一方面避免了總線上面的傳輸延時,使得電機同步更加及時準確。

評論