電梯控制系統的實現,附軟硬件架構圖

A H橋驅動
如圖所示,H橋式電機驅動電路包括4個三極管和一個電機。要使電機運轉,必須導通對角線上的一對三極管。根據不同三極管對的導通情況,電流可能會從左至右或從右至左流過電機,從而控制電機的轉向。
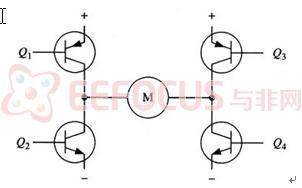
圖2 H橋驅動
要使電機運轉,必須使對角線上的一對三極管導通。當Q1管和Q4管導通時,電流就從電源正極經Q1從左至右穿過電機,然后再經Q4回到電源負極。當電流從Q1流經電機再流向Q4,該流向的電流將驅動電機順時針轉動。當三極管Q1和Q4導通時,電流將從左至右流過電機,從而驅動電機按特定方向轉動。另一對三極管Q2和Q3導通的情況,電流將從右至左流過電機。當三極管Q2和Q3導通時,電流將從右至左流過電機,從而驅動電機沿另一方向轉動。
實際使用的時候,用分立件制作H橋式是很麻煩的,好在現在市面上有很多封裝好的H橋集成電路,接上電源、電機和控制信號就可以使用了,在額定的電壓和電流內使用非常方便可靠。比如常用的L293D、L298N、TA7257P、SN754410等。
B 壓力傳感
壓力傳感器負責測量電梯里的承受壓力,判斷電梯里是否有人,如果沒人,將控制電梯里的燈變暗。除此功能之外,當壓力到達一定程度時,傳感器將判斷出超出承受范圍,電梯將不能繼續運行。在選擇產品時,我們需要綜合考慮線性度好、外圍電路簡單、靈敏度高,價格不高等綜合因素。C 直流電機
直流電機是本項目的核心部分,起到了控制電梯的運動,它的正轉反轉也將由電機來驅動,在沒有具體電梯材料的情況下,觀察電機的驅動運作情況可以直接定性的反映本項目的情況。
C 電機測速模塊
一塊長度為l,寬度為b,厚度為d的半導體薄片,當它被置于磁感應強度為B的磁場中,如果在其相對兩邊流通控制電流I,且磁場方向與電流方向正交,則在該半導體另外兩邊將產生一個與控制電流I和磁感應強度B乘積成正比的電勢UH,即UH=KHIB,其中KH為霍爾元件的靈敏度,該電勢稱為霍爾電勢,該半導體薄片就是霍爾元件,其大小和外磁場及電流成比例。霍爾開關傳感器由于其體積小,無觸點,動態特性好,使用壽命長等特點,廣泛應用于測量轉動物體旋轉速度領域。這里選用SPRAGUE公司生產的霍爾轉速傳感器,它是一種硅單片集成電路,其內部含有穩壓電路、霍爾電勢發生器、放大器、史密特觸發器和集電極開路輸出電路,具有工作電壓范圍寬、可靠性高、外電路簡單、輸出電平可與各種數字電路兼容等特點。
霍爾傳感器信號放大器將霍爾電勢UH放大后再經整形、放大,輸出幅值相等、頻率變化的方波信號,該霍爾電勢的幅值隨磁場強度變化而變化。
轉速的測量方法有很多種,根據脈沖計數實現轉速測量的方法主要有M法(測頻法)、T法(測周期法)和MPT法(頻率周期法)。該系統采用M法(測頻法),霍爾傳感器的測速電路,如圖所示。
3.3系統軟件架構
電梯控制的軟件框架由電梯的模式作為主體框架,以完成模式下的功能為驅動進行設計,各個模式的簡介如下:
故障修理模式:由管理員手動切換,在故障模式下工程人員可以實現對于電梯的故障檢修
一般運行模式:由管理員手動切換,一般運行模式是電梯的主要模式,完成電梯的主要功能
直接運行模式:由用戶切換或者管理員切換,直接運行模式下,電梯可以從當前層面直接到達底層。當出現火宅或者有病人需要急救時可以避免電梯在中間層停靠,以此爭取寶貴的時間
3.4 系統軟件流程
軟件的設計是根據狀態機的方式實現的,具體的軟件框圖如下:
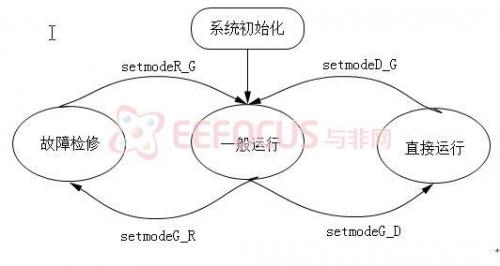
圖3 程序運行流程圖
3.4 系統預計實現結果
一些頭文件的申明
一些變量的申明

評論