全球主流8位MCU芯片詳細解剖No.3:微芯 PIC16F877

PIC16F877基本電路
PIC振蕩頻率電路
單片機振蕩電路與整體系統工作速度有直接的關系,例如同步∕異步串行傳輸、定時器等,都與振蕩頻率有關,不同系列單片機有不同振蕩頻率,根據產品資料手冊,PIC16F877振蕩頻率最高可到20MHz;在圖1中,振蕩電路接于Pin13(OSC1/CLKIN)與Pin14(OSC2/CLKOUT),而振蕩電路有以下四種形式:
LP:使用低功率振蕩晶體(Low Power Crystal)
XT:使用振蕩器∕諧振器(Crystal/Resonator)
HS:使用高速振蕩器(High Speed Crystal/Resonator)
RC:使用電阻∕電容(Resister/Capacitor)
一般常用振蕩晶體或是諧振器作為單片機振蕩源,外接電路及PIC內部電路說明如圖6所示。圖中電容C1與C2規格大小是根據Crystal或Resonator而有所不同,表1列出電容建議值,使用其它振蕩源的電路說明請參考產品資料手冊。
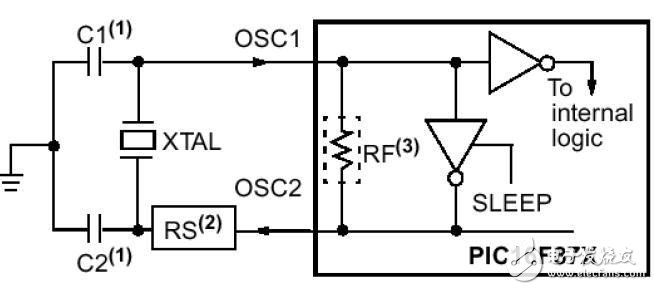
圖6. 振蕩源電路圖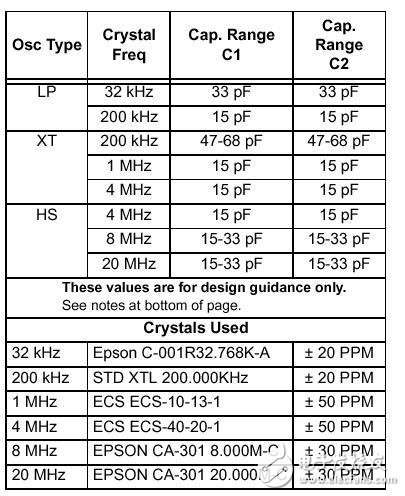
表1. 建議電容值
外加電源與重置電路
PIC16F877的工作電壓為5V,連接Pin11與Pin32,Pin12與Pin31為地線接腳;重置電路連接Pin1,按下Reset后,內部指令重頭開始執行,系統重新運作。
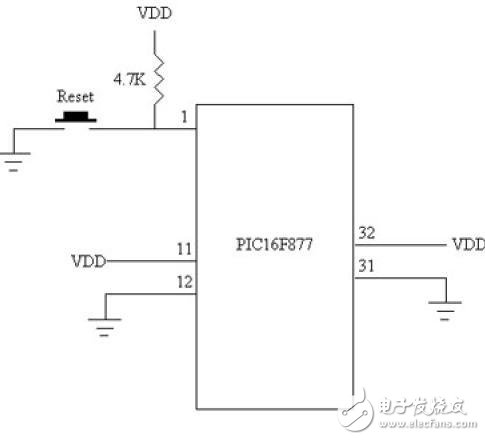
圖7. 電源與重置電路
輸入輸出接口
PIC16F877除了上述基本電路所占用的7支接腳外,其余的33支接腳都可當成輸出、輸入接腳,輸入輸出端口是單片機基本界面,可以與周邊電路進行電路控制和信號傳輸與檢測。PIC是8位的單片機,以接腳特性分組,每組盡量湊滿8支接腳,并將I/O命名為PORTA(RA0~RA5)、PORTB(RB0~RB7)、PORTC(RC0~RC7)、PORTD(RD0~RD7)和PORTE(RE0~RE2)等,各分組接口特性說明如下:
PORTA
PIC16F877的PORTA總共有6個位(RA0~RA5),PORTA的接腳可作為數字輸出輸入端口,而系統重置后,PORTA自動成為模擬輸入狀態,可讀取模擬輸入訊號。
PORTB
PORTB總共有8個位(RB0~RB7),可以撰寫程序規劃輸入輸出方向、狀態,其中,要進行燒錄時,使用到三支接腳,分別是Pin36(RB3/PGM)、Pin39(RB6/PGC)與Pin40(RB7/PGD)。
PORTC
PORTC總共有8個位(RC0~RC7),除了可作為數位I/O外,還和一些特殊功能的周邊電路共享接腳,例如CCP(直流馬達控制)、I2C、SPI(同步串行通訊電路)、UART(異步串行傳輸電路)等等。
PORTD
PORTD總共有8個位(RD0~RD7),可作一般數字I/O,并與PSP(Parallel Slave Port)并列傳輸接口共享。當整體系統需要多單片機時,彼此可以經由并列傳輸接口來快速傳輸資料。
PORTE
PORTE總共有3個位(RE0~RE2),PORTE的Pin8、9、10有三種功能,除了基本I/O功能,也有模擬輸入功能,而上述PORTD的并列傳輸接口設定所需的控制接腳,如/RD、/WR、/CS等,也是屬于PORTE接腳。
PIC16F877指令簡介
PIC16F877常用的語言有匯編語言與C語言兩種,匯編語言是將每一個機器碼使用一個文字代號代表,比較接近處理器真正動作模式;而C語言是比較符合人們的使用習慣,事先將匯編語言組合成C語言形式,使用較為方便,但是C語言所組譯的機器碼程序通常比較大,且組譯軟件通常需要額外購買。以下簡介匯編語言相關指令與一套C語言組譯軟件。
PIC16F877指令摘要
PIC是采用RISC(Reduced Instruction Set Computing,精簡指令集),與8051系列采用的CISC(Complicated Instruction Set Computing,復雜指令集)不同,PIC16F877所有指令指有35個,8051高達111個指令。
汽車電動助力轉向系統
1 引言
隨著電子控制技術的發展及其在汽車領域的廣泛應用, 電動助力轉向系統(Electric Power Steering, 簡稱EPS)越來越成為目前汽車電子技術研究的熱點之一。與傳統的轉向系統相比,EPS系統結構簡單,靈活性大,可以獲得理想的操縱穩定性,能動態地適應汽車行駛狀況的變化,在操縱舒適性、安全性、環保、節能、易于維修等方面也充分顯示了其優越性[1]。目前, 電動助力轉向已部分取代液壓助力轉向并獲得廣泛應用,如日本的大發、三菱、本田汽車公司,美國的Delphi汽車系統公司,德國的ZF公司等都相繼研制出各自的EPS并裝配使用。國內對EPS 系統的研究起步較晚,僅有清華、華中科大、吉林大學、合肥工大等高校開展了系統結構的方案設計、系統建模和動力學分析等研究,但處在理論探索、實驗研究階段。國內部分汽車廠商如重慶長安、南昌昌河、東風、一汽等與高校聯合研究,也都處在研制的初級階段,未達到實用程度[2]。
2 EPS系統的硬件組成及工作原理
2.1 EPS的硬件組成
EPS是一種直接依靠電力提供輔助扭矩的動力轉向系統,結構如圖2-1所示,它由電子控制單元(ECU)控制電機提供助力,系統主要由電子控制單元、扭矩傳感器、轉角傳感器、車速傳感器(可與其他系統共用)、直流電機、離合器、電磁繼電器、減速機構和轉向機構等組成。
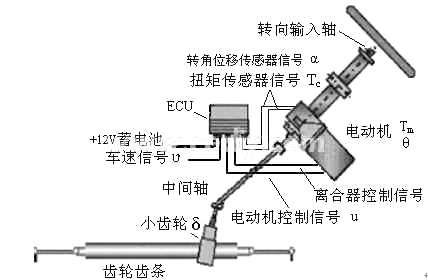
圖2-1 EPS系統結構圖
2.2 EPS的工作原理
當汽車點火開關閉合時,ECU上電開始對EPS系統進行自檢,自檢通過后,閉合繼電器和離合器,EPS系統便開始工作,當方向盤轉動時,位于轉向軸上的轉角傳感器和扭矩傳感器把測得方向盤上的角位移和作用于其上的力矩傳遞給ECU,ECU根據這兩個信號并結合車速等信息,控制電機產生相應的助力,實現在全速范圍內最佳控制:在低速行駛時,減輕轉向力,保證汽車轉向靈活、輕便,在高速行駛時,適當增加阻尼控制,保證轉向盤操作穩重、可靠。

評論