SPI應用是相當的廣了,同步串行總線,同步同步當然需要時鐘信號來統一了,這樣通訊雙方通訊時就比較默契沒那么延遲(呆呆)了。應用于中低速場合。
本文引用地址:
http://www.104case.com/article/201611/322996.htm學起來從哪些地方入手呢?如下:
SPI概念與特點 關鍵的時序接受 編程時重點 STM32內部的SPI使用(介紹、功能、中斷)
SPI概念與特點:不多說,串行,需要同步信號 主從結構的 CS(片選) SCK SDI SDO
全雙工 一主控多從 8或16位數據通信
其它特點:8個主模式波特率預分頻系數 fpcll/2
主模式和從模式下快速通行 并支持切換
編程MSB 或LSB在前
專用發送和接受標志可促發中斷
有SPI忙標志位
支持硬件CRC校驗,發送模式下crc值作為最后一個字節被發送,接受模式下最后一字節自動CRC校驗
支持錯誤中斷標志,支持DMA功能的1字節發送和接受緩沖器:產生發送和接受請求。
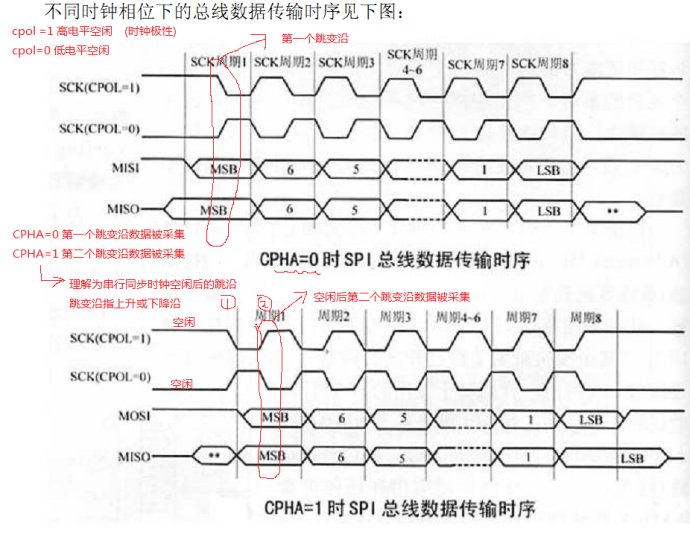
SPI總線時序介紹:
看下下圖應該就會了
使用stm32 spi需要以下的步驟
1.管腳因為復用的,故先配置好管腳、并打開spi時鐘
2.設置spi的工作模式
通過 SPI1_CR1 來設置,設置SPI1主機模式,設置數據格式8位,然后通過 CPOL 和 CPHA 位來設置 SCK時鐘極性及采樣方式。并設置 SPI1 的時鐘頻率(最大18Mhz),以及數據的格式(MSB 在前還是 LSB在前)。
3.使能SPI.
SPI固件庫函數
下面是初始化,必須得結構體原型
typedef struct
{
uint16_t SPI_Direction;//設置方向 (2線全雙工、2線只接受、一線發送、一線接受)
uint16_t SPI_Mode; //模式 (從或主設備)
uint16_t SPI_DataSize; //寬度 (8或16位)
uint16_t SPI_CPOL; //時鐘極性 (低或高)
uint16_t SPI_CPHA; //時鐘相位 (第一個或第二個跳變沿)
uint16_t SPI_NSS; //片選方式 (硬件或軟件方式)
uint16_t SPI_BaudRatePrescaler; //波特率預分頻 (從2---256分頻)
uint16_t SPI_FirstBit; //最先發送的位 (最低位,還是最高位在先)
uint16_t SPI_CRCPolynomial; //設置crc多項式 (數字)如7
}SPI_InitTypeDef;
下面是實例,對SPI2進行的初始化
void SPI2_Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
//配置SPI2管腳
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 |GPIO_Pin_14| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_Init(GPIOB, &GPIO_InitStructure);
//SPI2配置選項
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2 ,ENABLE);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI2, &SPI_InitStructure);
//使能SPI2
SPI_Cmd(SPI2, ENABLE);
}
。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
以上是,初始化的一些函數,發現固件庫還有很多函數沒用上,下面就要談到應用了
STM32的SPI串行外圍總線接口,本程序,是將STM32的SPI配置為全雙工模式,且NSS使用的軟件模式。在使用SPI前,下面的這個過程我們必須理解,即STM32作為主機發送一個字節數據時,必然能接收到一個數據,至于數據是否處理,由程序操作。


評論