AVR單片機(學習ing)-ATMEGA16的定時/計數器

初始化: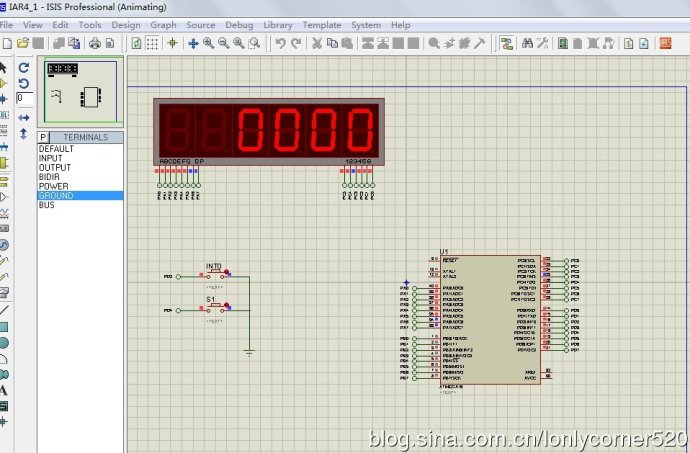
然后是按下INT0: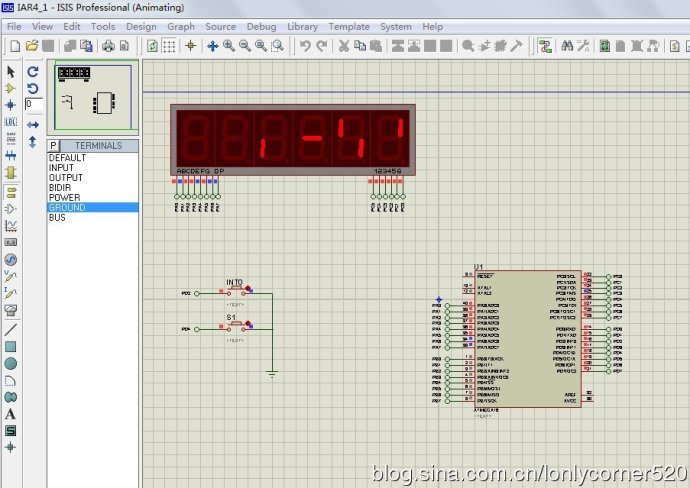
最后是按下S1: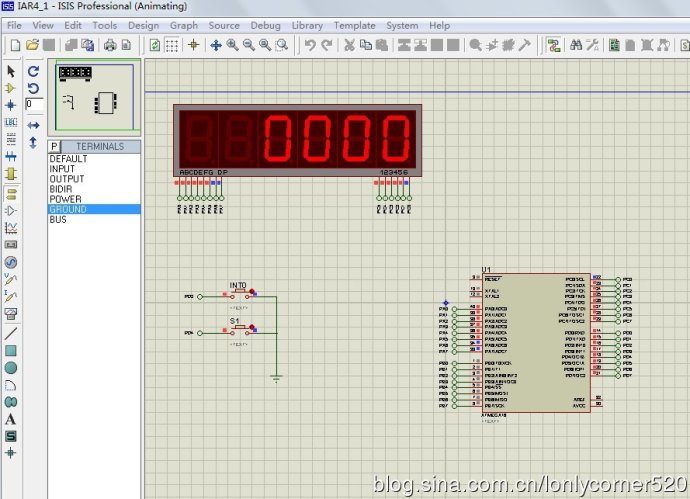
基本上就這點吧~~這里邊比較難理解的就是那個去取反的重定義!!!!再IAR工具的應用里會有介紹(就是持續更新的那個~~畢竟有很多要更新的~~)
然后是按下INT0:
最后是按下S1:
基本上就這點吧~~這里邊比較難理解的就是那個去取反的重定義!!!!再IAR工具的應用里會有介紹(就是持續更新的那個~~畢竟有很多要更新的~~)
然后就是程序了~~
主站蜘蛛池模板:
炉霍县|
宁德市|
肇东市|
丹阳市|
嫩江县|
都安|
诏安县|
江西省|
鹤山市|
博乐市|
柳河县|
大足县|
利川市|
开江县|
洱源县|
区。|
柳河县|
汾阳市|
林芝县|
阳山县|
邵武市|
合作市|
江孜县|
大新县|
高邮市|
贺兰县|
莱阳市|
南和县|
临高县|
淳安县|
渝中区|
昌乐县|
礼泉县|
延吉市|
武鸣县|
阳西县|
志丹县|
南木林县|
泉州市|
来安县|
井冈山市|
//------------------------------------------------------------------------------
//4位顯示秒表試驗
//使用INT0鍵進行計時的開始和停止,使用S1鍵作為計時值得清除。定時器T0被用作掃描4
//位數碼管(1ms),定時器T1則用來計時(10ms)
#include"ioavr.h"
#include"intrinsics.h"
typedef unsigned char uchar;
typedef unsigned int
__flash uchar seg[16]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,
__flash uchar act[4]={0xfe,0xfd,0xfb,0xf7};
uint
uchar flag_start;
uchar i;
#define CPL_BIT(x,y)
#define s1
#define xtal
//------------------------------------------------------------------------------
//延時1ms的函數,沒有參數傳遞
void
{
}
//------------------------------------------------------------------------------
//延時nms的函數,有參數傳遞
void
{
}
//------------------------------------------------------------------------------
//端口定義函數,用來定義ABCD四個端口的輸入輸出
void
{
}
//------------------------------------------------------------------------------
//T0的初始化定義
void
{
}
//------------------------------------------------------------------------------
//T1的初始化函數
void
{
}
//------------------------------------------------------------------------------
//按鍵檢測函數
void
{
}
//------------------------------------------------------------------------------
//芯片初始化函數,包含上面的所有初始化,以及沒有涉及的
void device_init()
{
}
//------------------------------------------------------------------------------
//main
void
{
}
//------------------------------------------------------------------------------
//INT0
#pragma vector=INT0_vect
__interrupt void
{
}
//------------------------------------------------------------------------------
//TIMER0_OVF
#pragma vector=TIMER0_OVF_vect
__interrupt void
{
}
//------------------------------------------------------------------------------
//TIMER1_OVF
#pragma vector=TIMER1_OVF_vect
__interrupt void
{
}
//4位顯示秒表試驗
//使用INT0鍵進行計時的開始和停止,使用S1鍵作為計時值得清除。定時器T0被用作掃描4
//位數碼管(1ms),定時器T1則用來計時(10ms)
#include"ioavr.h"
#include"intrinsics.h"
typedef unsigned char uchar;
typedef unsigned int
__flash uchar seg[16]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,
__flash uchar act[4]={0xfe,0xfd,0xfb,0xf7};
uint
uchar flag_start;
uchar i;
#define CPL_BIT(x,y)
#define s1
#define xtal
//------------------------------------------------------------------------------
//延時1ms的函數,沒有參數傳遞
void
{
}
//------------------------------------------------------------------------------
//延時nms的函數,有參數傳遞
void
{
}
//------------------------------------------------------------------------------
//端口定義函數,用來定義ABCD四個端口的輸入輸出
void
{
}
//------------------------------------------------------------------------------
//T0的初始化定義
void
{
}
//------------------------------------------------------------------------------
//T1的初始化函數
void
{
}
//------------------------------------------------------------------------------
//按鍵檢測函數
void
{
}
//------------------------------------------------------------------------------
//芯片初始化函數,包含上面的所有初始化,以及沒有涉及的
void device_init()
{
}
//------------------------------------------------------------------------------
//main
void
{
}
//------------------------------------------------------------------------------
//INT0
#pragma vector=INT0_vect
__interrupt void
{
}
//------------------------------------------------------------------------------
//TIMER0_OVF
#pragma vector=TIMER0_OVF_vect
__interrupt void
{
}
//------------------------------------------------------------------------------
//TIMER1_OVF
#pragma vector=TIMER1_OVF_vect
__interrupt void
{
}

關鍵詞:
AVR單片機ATMEGA16定時計數
評論