51單片機的串口通信

51 單片機內部有一個全雙工串行接口。什么叫全雙工串口呢?一般來說,只能接受或只能發送的稱為單工串行;既可接收又可發送,但不能同時進行的稱為半雙工;能同時接收和發送的串行口稱為全雙工串行口。串行通信是指數據一位一位地按順序傳送的通信方式,其突出優點是只需一根傳輸線,可大大降低硬件成本,適合遠距離通信。其缺點是傳輸速度較低。
與之前一樣,首先我們來了解單片機串口相關的寄存器。
SBUF 寄存器:它是兩個在物理上獨立的接收、發送緩沖器,可同時發送、接收數據,可通過指令對SBUF 的讀寫來區別是對接收緩沖器的操作還是對發送緩沖器的操作。從而控制外部兩條獨立的收發信號線RXD(P3.0)、TXD(P3.1),同時發送、接收數據,實現全雙工。
串行口控制寄存器SCON(見表1) 。
表1 SCON寄存器

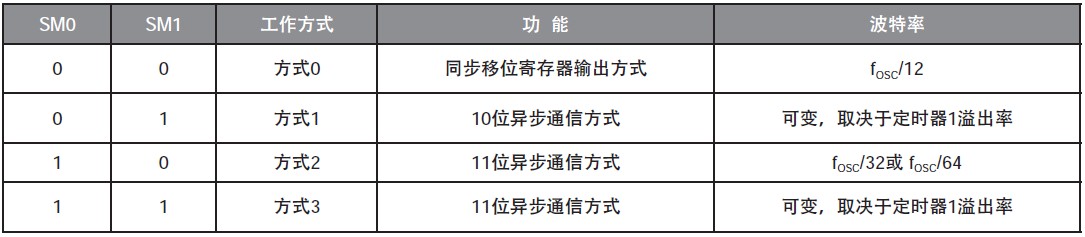
SM0 和SM1 :串行口工作方式控制位,其定義如表2 所示。
表2 串行口工作方式控制位
SM2 :多機通信控制位。 該僅用于方式2 和方式3 的多機通信。其中發送機SM2 = 1(需要程序控制設置)。接收機的串行口工作于方式2 或3,SM2=1 時,只有當接收到第9 位數據(RB8)為1 時,才把接收到的前8 位數據送入SBUF,且置位RI 發出中斷申請引發串行接收中斷,否則會將接受到的數據放棄。當SM2=0 時,就不管第位數據是0 還是1,都將數據送入SBUF,并置位RI 發出中斷申請。工作于方式0 時,SM2 必須為0。
REN :串行接收允許位:REN =0 時,禁止接收;REN =1 時,允許接收。
TB8 :在方式2、3 中,TB8 是發送機要發送的第9 位數據。在多機通信中它代表傳輸的地址或數據,TB8=0 為數據,TB8=1 時為地址。
RB8 :在方式2、3 中,RB8 是接收機接收到的第9 位數據,該數據正好來自發送機的TB8,從而識別接收到的數據特征。
TI :串行口發送中斷請求標志。當CPU 發送完一串行數據后,此時SBUF 寄存器為空,硬件使TI 置1,請求中斷。CPU 響應中斷后,由軟件對TI 清零。
RI :串行口接收中斷請求標志。當串行口接收完一幀串行數據時,此時SBUF 寄存器為滿,硬件使RI 置1,請求中斷。CPU 響應中斷后,用軟件對RI 清零。
電源控制寄存器PCON(見表3) 。
表3 PCON寄存器

SMOD :波特率加倍位。SMOD=1,當串行口工作于方式1、2、3 時,波特率加倍。SMOD=0,波特率不變。
GF1、GF0 :通用標志位。
PD(PCON.1) :掉電方式位。當PD=1 時,進入掉電方式。
IDL(PCON.0) :待機方式位。當IDL=1 時,進入待機方式。
另外與串行口相關的寄存器有前面文章敘述的定時器相關寄存器和中斷寄存器。定時器寄存器用來設定波特率。中斷允許寄存器IE 中的ES 位也用來作為串行I/O 中斷允許位。當ES = 1,允許 串行I/O 中斷;當ES = 0,禁止串行I/O 中斷。中斷優先級寄存器IP的PS 位則用作串行I/O 中斷優先級控制位。當PS=1,設定為高優先級;當PS =0,設定為低優先級。
波特率計算:在了解了串行口相關的寄存器之后,我們可得出其通信波特率的一些結論:
① 方式0 和方式2 的波特率是固定的。
在方式0 中, 波特率為時鐘頻率的1/12, 即fOSC/12,固定不變。
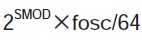
在方式2 中,波特率取決于PCON 中的SMOD 值,即波特率為:
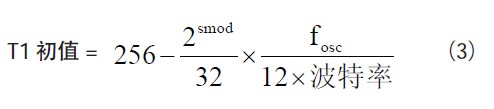
② 方式1 和方式3 的波特率可變,由定時器1 的溢出率決定。



 二、電路詳解
二、電路詳解
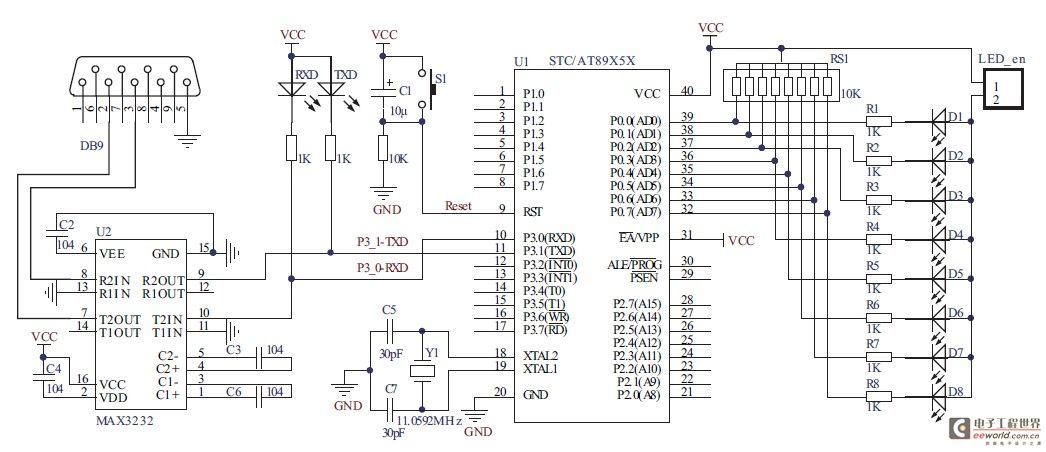
圖1 串行通信實驗電路圖
最小系統部分(時鐘電路、復位電路等)第一講已經講過,在此不再敘述。我們重點來了解下與計算機通信的RS-232 接口電路。可以看到,在電路圖中,有TXD 和RXD 兩個接收和發送指示狀態燈,此外用了一個叫MAX3232 的芯片,那它是用來實現什么的呢?首先我們要知道計算機上的串口是具有RS-232 標準的串行接口,而RS-232 的標準中定義了其電氣特性:高電平“1”信號電壓的范圍為-15V~-3V,低電平“0”信號電壓的范圍為+3V~+15V。可能有些讀者會問,它為什么要以這樣的電氣特性呢?這是因為高低電平用相反的電壓表示,至少有6V 的壓差,非常好的提高了數據傳輸的可靠性。由于單片機的管腳電平為TTL,單片機與RS-232 標準的串行口進行通信時,首先要解決的便是電平轉換的問題。一般來說,可以選擇一些專業的集成電路芯片,如圖中的MAX3232。MAX3232 芯片內部集成了電壓倍增電路,單電源供電即可完成電平轉換,而且工作電壓寬,3V~5.5V 間均能正常工作。其典型應用如圖中所示,其外圍所接的電容對傳輸速率有影響,在試驗套件中采用的是0.1μF。

評論